튜토리얼 1: 힘/토크 센서
CANbus 노드 및 연결
본 튜토리얼에서는 ROBOTOUS 힘/토크 센서로 CANbus 통신 시스템 인터페이스를 구축하는 내용을 다룹니다. 전체 시스템 연결도와 인터페이스를 구성할 CANbus 장치인 힘/토크 센서와 추가 장치 대한 정보는 아래 표와 같습니다.

| 종류 | 설명 | 수량 |
|---|---|---|
| ROBOTOUS RFT80-6A01 | 6축 힘/힘/토크 센서∅80×22mm, 210g | 1 |
| W1502 케이블 | - | 1 |
| RS485/CAN 커넥터 | - | 1 |
CANbus 시스템 구성 요소
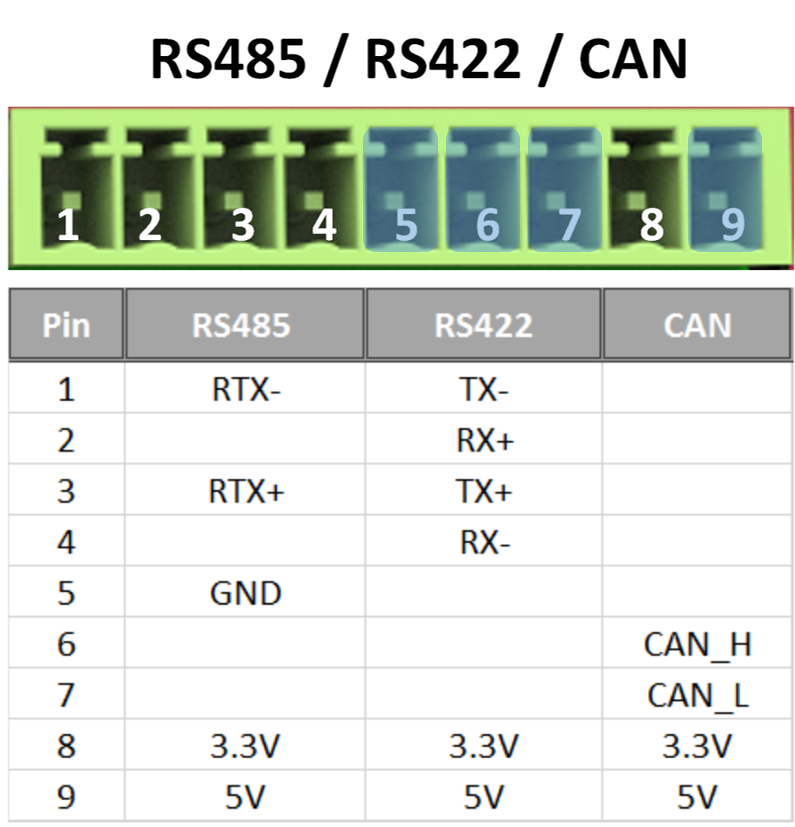
먼저 힘/토크 센서의 입출력 PIN 중에서 CANbus 통신에 필요한 CAN HIGH, CAN LOW, GND, 5V PIN 만을 사용할 것이기 때문에 이를 분류할 수 있는 케이블을 연결해야 합니다. 아래 자료를 참고하여 힘/토크 센서에 E91337 케이블과 W1502 케이블을 연결합니다.
케이블 작업 후, 아래 그림을 참고하여 STEP 제어기의 CANbus 커넥터와 W1502 의 PIN 맵을 대조하여 요구되는 커넥터에 맞는 케이블을 연결합니다.
커넥터와 케이블을 모두 연결하는 것으로 CANbus 통신 시스템 인터페이스 구성을 완료합니다.
CANbus Bitrate 설정
PuTTY 와 같은 SSH 를 이용하여 STEP 에 접속하고, 아래 터미널 명령어를 통해 STEP 에 기본적으로 설치 된 CAN 유틸리티를 확인할 수 있습니다. 각각의 유틸리티에 대한 설명은 STEP 통신 연결하기의 CANbus 에 자세히 설명되어 있습니다.
1 | |
그 다음, ROBOTOUS 힘/토크 센서를 사용하기 위해서 STEP 과 센서 사이에 연결된 CANbus 통신을 센서의 기본 설정에 맞게 조정해야 하며, 센서 기본 설정은 아래 표와 같습니다.
| Item | Default Values | Remarks | |
|---|---|---|---|
| CAN | UART | ||
| Filtering | Filter OFF | Filter OFF | |
| Data Output Rate | 200Hz | 200Hz | |
| Message ID | Receiver ID: 100(0x64)Transmitter ID #1: 1(0x01)Transmitter ID #2: 2(0x02) | N/A | CAN only |
| Communication Setting | CAN 2.0 A, B CompatibleIdentifier: Standard IdentifierBit Rate: 1MbpsSize of Data: 8 bytes | Baud Rate: 115,200bps1 Stop BitNo ParityNo Flow ControlData Length: 8 Bits | |
Default Setting of Communication (ROBOTUS INC., 6 Axis Force Torque Sensor RFT Series Installation and Operation Manual)
위 표를 통해 알 수 있듯이, 힘/토크 센서 사용을 위해 아래 명령어로 비트레이트를 1Mbps 로 바꿔주어야 합니다.
1 | |
정상적으로 비트레이트가 업데이트되면 Bit rate updating SUCCESSFULLY! 문구가 출력됩니다.
힘/토크 센서 제어
센서 설정을 완료하면 힘/토크 센서로 CANbus 메시지를 송수신하는 것이 가능합니다. 그러므로 SERCAN_send 명령어로 STEP 과 힘/토크 센서 사이에 CANbus 통신이 제대로 이루어지는지 확인해보도록 합니다. ROBOTOUS 힘/토크 센서의 CANbus 패킷 정의는 다음과 같습니다.
| Command | Command ID | No. of Parameters | w/Response Packet | Remarks |
|---|---|---|---|---|
| Read Model Name | 1(0x01) | 0 | Yes | |
| Read Serial Number | 2(0x02) | 0 | Yes | |
| Read Firmware Version | 3(0x03) | 0 | Yes | |
| Set Communication ID | 4(0x04) | 3 | Yes | CAN only |
| Read Communication ID | 5(0x05) | 0 | Yes | CAN only |
| Set Baud-rate | 6(0x06) | 1 | Yes | UART only |
| Read Baud-rate | 7(0x07) | 0 | Yes | |
| Set Filter | 8(0x08) | 2 | Yes | |
| Read Filter Setting | 9(0x09) | 0 | Yes | |
| Read F/T Data Output (once) | 10(0x0A) | 0 | Yes | |
| Start F/T Data Output | 11(0x0B) | 0 | Yes | |
| Stop F/T Data Output | 12(0x0C) | 0 | No | Available even during data output |
| Reserved | 13(0x0D) | N.A. | N.A. | |
| Reserved | 14(0x0E) | N.A. | N.A. | |
| Set Data Output Rate | 15(0x0F) | 1 | Yes | |
| Read Data Output Rate | 16(0x10) | 0 | Yes | Available even during data output |
| Set Bias | 17(0x11) | 1 | No | |
| Read Count of Overload Occurrence | 18(0x12) | 0 | Yes |
Summary of command packets (ROBOTOUS INC., 6 Axis Force Torque Sensor RFT Series Installation and Operation Manual)
Read Model Name
CANbus 통신이 제대로 이루어지는지 확인하기 위해, 먼저 힘/토크 센서로부터 Model Name 을 받아오는 과정을 진행합니다. PuTTY 를 1개 더 실행하여 아래와 같은 SERCAN_dump 명령어를 입력합니다. 명령어 입력이 완료되면 해당하는 PuTTY 는 힘/토크 센서로부터 CANbus 통신을 수신하는 터미널로 동작하게 됩니다.
1 | |
아래 표를 확인하여 힘/토크 센서로부터 Model Name 을 받아오는 command 의 패킷을 찾아 (XX 0x00, NULL) STEP 에서 힘/토크 센서로 전송합니다. 이 때, 2개의 PuTTY 터미널 중 수신용 터미널 외 다른 PuTTY 에서 아래와 같은 SERCAN_send 명령어를 사용합니다.
1 | |
| Receiver ID | Data Field | |||||||
|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | |
| 064 | 01 | XX | XX | XX | XX | XX | XX | XX |
패킷을 전송하고 나면, 수신용 PuTTY 가 다음과 같은 CANbus 메시지를 출력하는 것을 확인할 수 있습니다.
1 2 | |
ROBOTOUS 힘/토크 센서의 메뉴얼을 참고하면, 이렇게 도착한 패킷은 Model Name command 와 ASCII Code 로 된 Model Name 이 같이 쓰여진 것입니다. Model Name command 인 0x1 노드의 0Byte 자리의 hex 문자를 제외하고 나머지 hex 문자 52 46 54 38 30 2D 36 41 30 31 2D 41 을 ASCII 코드표를 확인해서 텍스트 문자로 변환하면 RFT80-6A01-A 같은 Model Name 이 나오는 것을 확인할 수 있습니다.
이때, CANbus 통신이 원활하게 이루어지지 않는 문제가 발생하면, STEP 의 CAN card 에 위치한 리셋 버튼을 눌러보거나, SERCAN 펌웨어 업데이트 를 참고하여 SERCAN 펌웨어를 업데이트 하십시오.
Start/Stop F/T Data Output
CANbus 통신이 정상적으로 확인되면, 다음으로 힘/토크 센서로부터 Torque 값과 Force 값을 받아오는 과정을 진행해보도록 합니다. 이 과정 역시 2개의 PuTTY 를 실행하여 진행합니다.
아래 표와 명령어를 확인하여 힘/토크 센서로부터 실시간으로 값을 받아오는 command 의 패킷을 찾아 STEP 에서 힘/토크 센서로 전송합니다.
1 | |
| Receiver ID | Data Field | |||||||
|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | |
| 064 | 0B | XX | XX | XX | XX | XX | XX | XX |
패킷을 전송하고 나면, 수신용 PuTTY 에서 다음과 같은 형식의 CANbus 메시지를 실시간으로 수신받는 것을 확인할 수 있습니다.
1 2 | |
ROBOTOUS 힘/토크 센서의 메뉴얼을 참고하면, 이렇게 도착한 패킷은 실시간 Sensing command 와 16진수로 표현된 Force 값과 Torque 값이 같이 쓰여진 것입니다. 실시간 Sensing command 인 0x1 노드의 0Byte 자리의 hex 문자를 제외하고, 나머지 16진수들 F9 7F 07 B2 1E B9 FC D4 FB 88 05 53을 10진수로 변환하면, X, Y, Z torque value 와 X, Y, Z force value 를 구할 수 있습니다 (자세한 내용은 아래의 16진수-10진수 변환 방법을 참고하십시오).
힘/토크 센서로부터 실시간으로 Torque 값과 Force 값을 받아오는 것을 멈추고 싶다면, 실행 명령어와 해당 command 의 패킷은 다음과 같습니다.
1 | |
| Receiver ID | Data Field | |||||||
|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | |
| 064 | 0C | XX | XX | XX | XX | XX | XX | XX |
16진수-10진수 변환 방법
| Data Field | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | D9 | D10 | D11 | D12 | D13 | D14 | D15 | D16 |
| ID | R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | R9 | R10 | R11 | R12 | R13 | XX | XX |
힘/토크 센서로부터 받은 패킷은 위의 표와 같은 형식을 갖춥니다. 이 때, 각 데이터 필드는 다음과 같습니다.
- R1 : Fx's upper byte, R2 : Fx's lower byte
- R3 : Fy's upper byte, R4 : Fy's lower byte
- R5 : Fz's upper byte, R6 : Fz's lower byte
- R7 : Tx's upper byte, R8 : Tx's lower byte
- R9 : Ty's upper byte, R10 : Ty's lower byte
- R11 : Tz's upper byte, R12: Tz's lower byte
각각의 upper byte 와 lower byte 에 대해 다음의 연산을 실시하면 해당하는 값의 10진수 값을 얻을 수 있습니다.
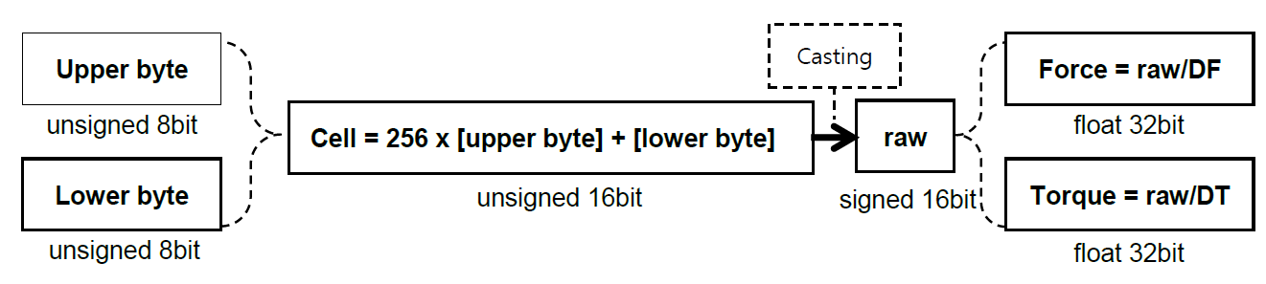
이때, RFT80-6A01 모델의 스펙에 따라 DF 는 50, DT 는 1000으로 계산합니다.
CANbus 프로젝트 컴파일
STEP 통신 연결하기의 SERCAN 예제에서는 sercan_test 예제를 살펴봤다면, 여기에서는 힘/토크 센서를 제어할 수 있도록 rtsercan_test 를 변형한 예제에 대해 설명합니다. 해당 예제는 다음과 같습니다.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 | |
위와 같이, rtsercan_test 예제의 main.cpp 파일을 위의 코드로 된 main.cpp 파일로 교환하는 것만으로도 힘/토크 센서로부터 값을 받아오는 프로젝트를 완성할 수 있습니다. 이후, 실행을 위해 프로젝트 컴파일을 진행해야하며, 이 과정은 EtherCAT CORE 예제의 8. EtherCAT 프로젝트 컴파일 과정과 동일합니다.
CANbus 어플리케이션 실행
CANbus 어플리케이션을 실행은 EtherCAT 어플리케이션과 동일하게 WinSCP 프로그램을 통해 파일을 STEP 에 전송하여 진행합니다. 실행 방법에 대한 자세한 내용은 7. EtherCAT 어플리케이션 실행 을 참고하십시오.
