튜토리얼 3: Elmo 모터 드라이버 예제
1. EtherCAT 슬레이브
본 튜토리얼에서는 Elmo Gold Solo Whistle 모터 드라이버를 슬레이브 장치로 EtherCAT 시스템 인터페이스를 구축하는 예제에 대해 설명합니다. 튜토리얼에서 시스템 인터페이스를 구성할 EtherCAT 슬레이브 및 추가 장치에 대한 전체 연결도와 정보는 다음과 같습니다.

| 종류 | 설명 | 수량 |
|---|---|---|
| G-SOLWHI15/100EE | Elmo Gold Solo Whistle 모터 드라이버 | 1 |
| HT02300-A00-HZ | Emoteq, Inc brushless DC 모터 | 1 |
| 8PIN 고정식 단자대 | - | 1 |
| MB049 V2 (Read Head) & MRA049BC025DSE00 (Ring) | AKSIM-2 OFF-AXIS 앱솔루트 로터리 엔코더 | 1 |
| MB049 V2 부속 케이블 | Encoder 부속 8PIN 연결 케이블 | 1 |
| E173743 AWM 2464 VW-1 300V 케이블 | HD-LINK 케이블과 Port A 접속 케이블 연결용 케이블 | 1 |
| 4PIN 고정식 단자대 | - | 1 |
| HD-LINK serial 9PIN 케이블 M형 | Encoder PIN 선별용 케이블 | 1 |
| HD-LINK serial 9PIN 케이블 F형 | Encoder PIN 선별용 케이블 | 1 |
| EM3818 CBL-GSTOCOM-A2 케이블 | Safe Power Off 전원 공급용 케이블 | 1 |
| ELMO WIRE – TELDOR 90C4206109 24 AWG 300V UL 1581 VW-1 2787576/451770 케이블 | Elmo driver의 Port A 접속 케이블 | 1 |
| HIV 전선 | Main Power 및 Motor Phase 연결용 전선 & 엔코더 용 신호선 | 1 |
| 파워 서플라이 | - | 2 |
EtherCAT 슬레이브 시스템 구성 요소
2. EtherCAT 마스터와 슬레이브 연결
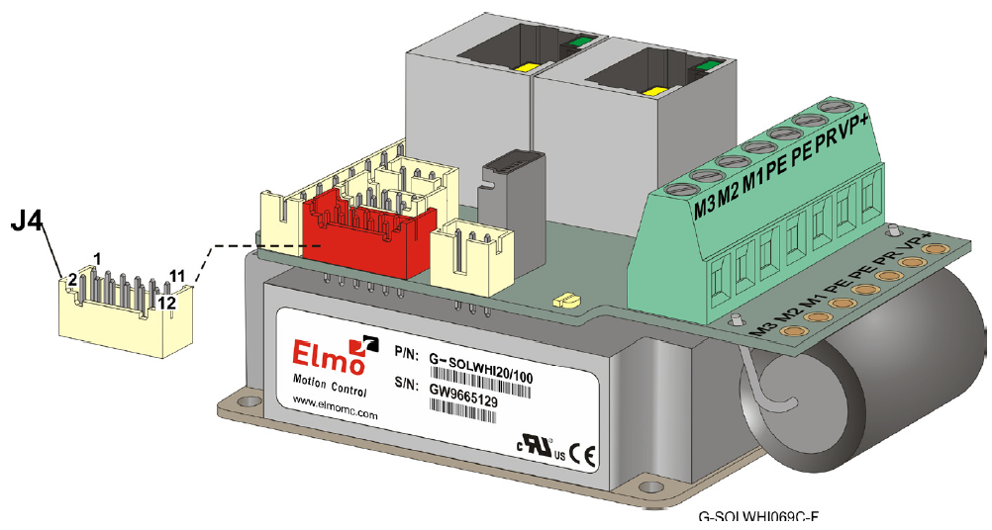
Port A 커넥트 케이블 (J4 Cable) 연결하기
| Incremental Encoder | Absolute Serial Encoder | |||
|---|---|---|---|---|
| PIN (J4) | Signal | Function | Signal | Function |
| 1 | +5V | Encoder +5V supply | +5V | Encoder +5V supply |
| 2 | COMRET | Common Return | COMRET | Common Return |
| 3 | PortA_ENC_A+ | Channel A+ | ABS_CLK+ | Absolute encoder clock+ |
| 4 | PortA_ENC_A- | Channel A- | ABS_CLK- | Absolute encoder clock- |
| 5 | PortA_ENC_B+ | Channel B+ | ABS_DATA+ | Absolute encoder data+ |
| 6 | PortA_ENC_B- | Channel B- | ABS_DATA- | Absolute encoder data- |
| 7 | PortA_ENC_INDEX+ | Index+ | Reserved | Reserved |
| 8 | PortA_ENC_INDEX- | Index- | Reserved | Reserved |
| 9 | HA | Hall Sensor A | HA | Hall Sensor A |
| 10 | HB | Hall Sensor B | HB | Hall Sensor B |
| 11 | HC | Hall Sensor C | HC | Hall Sensor C |
| 12 | COMRET | Common Return | COMRET | Common Return |
Port A Pin Assignments (Gold Solo Whistle Digital Servo Drive Installation Guide EtherCAT and CAN Manual Ver. 1.508, p.37)
위의 표에서 확인하실 수 있듯이, Elmo Gold Solo Whistle 모터 드라이버는 위치, 속도, 토크 값을 계산 및 출력하는데 센서 값 외에도 앱솔루트 값이 필요합니다. 하지만, Emoteq 모터의 홀 센서에서는 이러한 값을 제공하지 않습니다. 따라서 본 튜토리얼에서는 모터의 홀 센서에 그와 같은 앱솔루트 값들을 제공하는 직렬 동기 인터페이스 (Serial Synchronous Interface, SSI) 의 앱솔루트 로터리 엔코더를 병렬로 연결하여 사용하는 방법에 대해 설명합니다.
모터의 홀 센서와 SSI 앱솔루트 로터리 엔코더를 병렬로 연결하여 사용한다는 것은 간단히 말해 Elmo Gold Whistle 모터 드라이버의 Port A (J4) 에 모터의 5V, PR, Hall Sensor A, Hall Sensor B, Hall Sensor C PIN 과 SSI 앱솔루트 로터리 엔코더의 5V, PR, Absolute encoder data+, -, Absolute encoder clock+, - PIN을 함께 연결한다는 것을 의미합니다.
구체적으로, 엔코더에 부속 PIN 케이블을 연결한 뒤, 케이블의 끝을 8개의 신호선으로 분리하여 HD-LINK serial 9 PIN port 에 연결합니다. 이 과정을 통해 HD-LINK serial 9PIN port 를 사용으로 맞물리는 다른 1 개의 HD-LINK serial 9PIN port 에서 나오는 신호선들을 선별적으로 사용할 수 있게 됩니다. 단, 이때 주의할 점은 엔코더의 PIN port 에서 8PIN 을 구분하고, 각 PIN에 연결된 신호선을 HD-LINK serial 9PIN port 의 어느 위치에 연결했는지 기록해두어야 한다는 것입니다.
엔코더의 PIN port 에서 8PIN 의 구분은 다음과 같습니다.
| 8-pin connector (MB029, MB049, MB080) | SSI |
|---|---|
| 1 | Vdd |
| 2 | GND |
| 3 | Temp. Sens. 1 |
| 4 | Temp. Sens. 2 |
| 5 | Clock + |
| 6 | Clock - |
| 7 | Data + |
| 8 | Data - |

엔코더 부속 PIN 케이블과 Encoder와 9 PIN port 연결
(AksIM-2 off-axis rotary absolute encoder Data sheet Issued 1, 18th December 2017, p.16)
다음으로, 위에서 연결한 HD-LINK serial 9PIN port 와 맞물리는 다른 한 개의 HD-LINK serial 9PIN port 에 신호선 6개를 연결합니다. 이 때, 신호선을 연결해야 하는 PIN 은 Vdd, GND, Clock+, Clock-, Data+, Data- PIN 입니다.
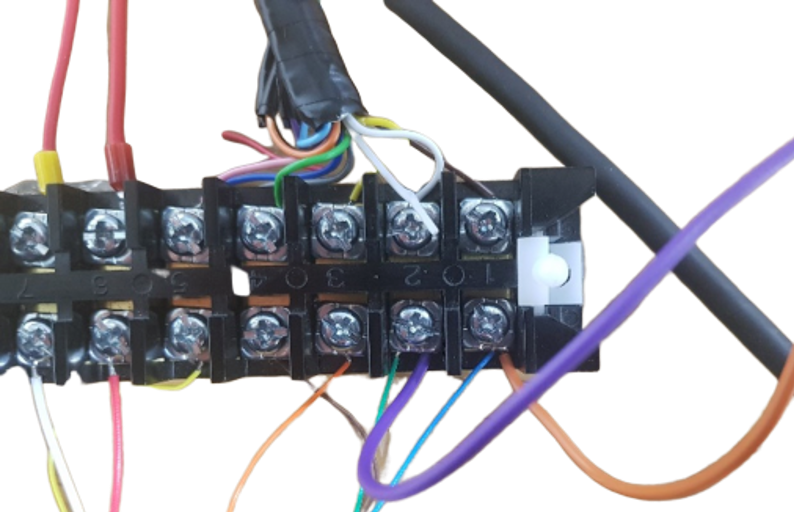
신호선 6개의 연결을 완료한 다음, 엔코더의 전원선과 데이터 송수신 케이블을 나눠줍니다. 이 두 종류의 선들은 서로 연결되는 지점이 다르기 때문에, 데이터 송수신 케이블 4개를 구분하여 4PIN 고정식 단자대에 연결합니다.
신호선 구분 후, E173743 AWM 2464 VW-1 300V 케이블을 사용하여 4PIN 고정식 단자대와 ELMO WIRE – TELDOR 90C4206109 24 AWG 300V UL 1581 VW-1 2787576/451770 케이블을 연결합니다. 이 때 위의 표와 그림을 참고하여 연결 위치를 한 번 더 확인합니다. 최종 연결 위치를 정리하면 아래와 같이 요약할 수 있습니다.
| Encoder PIN | Elmo Gold Driver Port A PIN | |||
|---|---|---|---|---|
| PIN matching position | ||||
| 5 | Clock + | Absolute encoder clock + | 3 | |
| 6 | Clock - | Absolute encoder clock - | 4 | |
| 7 | Data + | Absolute encoder data + | 5 | |
| 8 | Data - | Absolute encoder data - | 6 | |
엔코더 PIN 에 대응하는 Elmo Gold 드라이버 Port A PIN

엔코더와의 전체 연결도(부속 PIN 케이블, 9PIN port, 4PIN 고정식 단자대, E173743 케이블, Elmo Port A 케이블)
Emoteq 모터 연결하기
엔코더의 연결 전, 모터를 먼저 설치하여 홀 센서와 Elmo Gold Driver Port A 케이블과 연결하는 과정의 어려움을 줄일 수 있습니다.

위의 사진과 같이, Emoteq 모터를 클램프로 고정하고, 모터에서 나오는 홀 센서의 PowerIN, PowerReturn, Sensor A, B, C 및 Motor Phase A, B, C 케이블을 8핀 고정식 단자대에 구분하여 연결합니다.
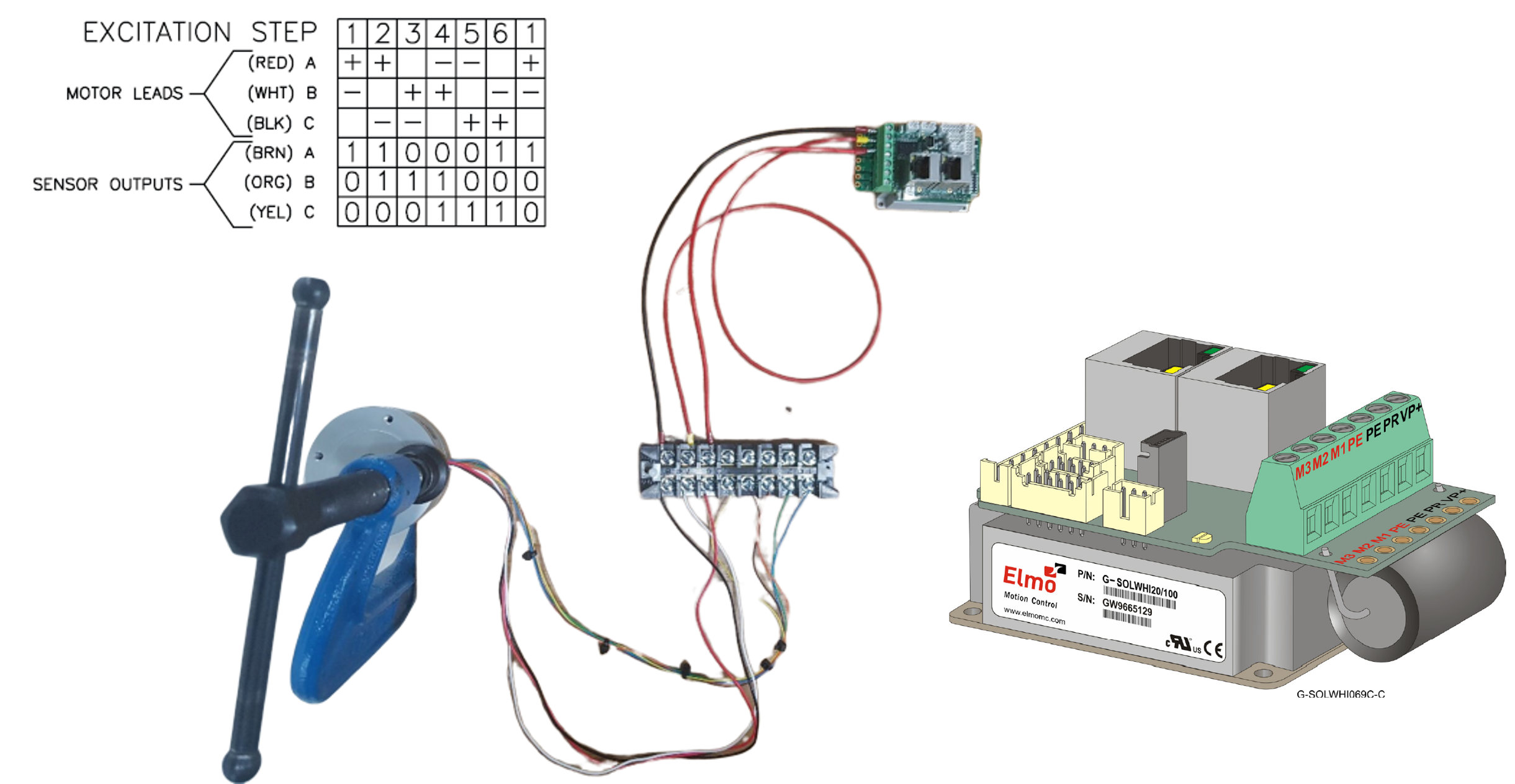
모터의 고정과 단자 연결이 완료되면, 위의 사진을 참고하여 모터의 Motor Leads 단자와 Elmo Gold Driver 의 Phase output 단자를 연결합니다. (자세한 내용은 Emoteq 의 Direct Drive Housed and Frameless Brushless DC Motors Engineering Guide, 11 page 와 Gold Solo Whistle Digital Servo Drive Installation Guide, 26 page를 참고하십시오.)
| PIN (J28) | Signal | Function | Cable - Wires | |
|---|---|---|---|---|
| Brushless Motor | Brushed DC Motor | |||
| 4 | PE | Protective earth | Motor | Motor |
| 3 | M1 | Motor phase | Motor | N/C |
| 2 | M2 | Motor phase | Motor | Motor |
| 1 | M3 | Motor phase | Motor | Motor |
모터 파워 커넥터 PIN 상세 (Gold Solo Whistle Digital Servo Drive Installation Guide EtherCAT and CAN Manual Ver. 1.508, 26p)
정리하자면, 다음과 같이 PIN 을 연결해야 합니다.
| Emoteq Brushless Motor | Elmo Gold Solo Driver | |||
|---|---|---|---|---|
| PIN matching position | ||||
| (RED) A | Motor leads | Motor phase | M1 | |
| (WHT) B | Motor leads | Motor phase | M2 | |
| (BLK) C | Motor leads | Motor phase | M3 | |
Motor leads PIN 에 대응하는 Motor phase PIN
Emoteq 모터 홀 센서 연결하기

다음 과정은 모터의 홀 센서를 Elmo Gold 드라이버의 Port A 케이블에 연결하고, 엔코더에 전원 PIN 을 연결하는 것입니다. Elmo Gold 드라이버의 Port A 에 관한 마무리 단계입니다. 먼저, 위 그림과 같이 Port A 케이블과 모터의 홀 센서를 연결해주어야 합니다. (자세한 내용은 Emoteq 의 Direct Drive Housed and Frameless Brushless DC Motors Engineering Guide, 11 page 와 Port A 커넥트 케이블 (J4 Cable) 연결하기의 그림 및 표를 참고하십시오.)
| Emoteq Brushless Motor | Elmo Driver Port A PIN | |||
|---|---|---|---|---|
| PIN matching position | ||||
| BLUE | +5V to +24V VDC | +5V | 11 | |
| GREEN | GND | COMRET | 2 | |
| BROWN | Sensor A | HA | 9 | |
| ORANGE | Sensor BC | HB | 10 | |
| YELLOW | Sensor C | HC | 11 | |
모터 홀 센서 PIN 에 대응하는 Port A PIN
모터 홀 센서의 PIN 연결을 모두 완료하면 다음으로 엔코더의 전원선을 연결합니다. 연결해야 하는 위치는 8PIN 고정식 단자대에서 모터 센서의 전원선이 연결된 부분이며, 표로 정리하면 다음과 같습니다.
| Emoteq Brushless Motor | Elmo Driver Port A PIN | Encoder PIN | ||||
|---|---|---|---|---|---|---|
| PIN matching position | ||||||
| BLUE | +5V to +24V VDC | 1 | +5V | 1 | Vdd | |
| GREEN | GND | 2 | COMRET | 2 | GND | |
Port A PIN 에 대응하는 모터 PIN 과 엔코더 PIN

그럼 Port A 에 연결 할 모터 홀 센서와 엔코더의 병렬 연결 처리가 모두 완료됩니다. 마지막으로 위 그림과 같이 Port A 에 케이블 (ELMO WIRE – TELDOR 90C4206109 24 AWG 300V UL 1581 VW-1 2787576/451770) 을 연결합니다.
STEP 연결하기
모터와 홀 센서, 엔코더의 연결이 완료되면, STEP 를 준비합니다. 그 다음, STEP 의 EtherCAT port 에서 Elmo Gold 드라이버의 EtherCAT IN port 까지 EtherCAT 케이블로 연결합니다.
파워 서플라이 연결하기
Elmo Gold 드라이버는 EtherCAT 시스템 구성에 있어 메인 파워와 Safe Torque Off (STO) 2개의 파워가 필요합니다 (Gold Solo Whistle Digital Servo Drive Installation Guide EtherCAT and CAN Ver. 1.508). 이를 위해 2개의 파워 서플라이와 두 쌍의 단자를 준비하고 파워 서플라이 각각에 전원 케이블을 연결합니다. 이 때, STO 단자에 공급해주어야 하는 전압은 24V 이고, Elmo Gold 드라이버의 메인 파워로 공급해주어야 하는 전압은 12~195V 입니다. 그러므로 24V 단자에 STO 케이블을 연결하고 이를 다시 Elmo Gold 드라이버의 STO 단자에 연결합니다. 그 다음, 메인 파워 (우측부터 V+, PR) 를 연결합니다. 이로써 Elmo Gold 드라이버의 시스템 구성을 완료합니다. 전원을 모두 켜면 STEP 과 Elmo Gold 모터 드라이브에 LED 가 점등됩니다.
3. EtherCAT 슬레이브 스캔 및 EcatTool 실행
이에 대한 내용은 EtherCAT CORE 예제 에 설명되어 있으므로, CORE 예제의 3. EtherCAT 슬레이브 스캔 부분과 4. EtherCAT Tool 실행 부분을 참고하십시오. 다만, EtherCAT 슬레이브 스캔 시, 본 튜토리얼에서의 슬레이브는 Elmo Gold Solo Whistle 모터 드라이버 1개 이므로 총 1개만 스캔되는 것이 정상입니다.
4. PDO 항목 설정 및 도메인 구성
Elmo Gold Solo Whistle PDO 매핑
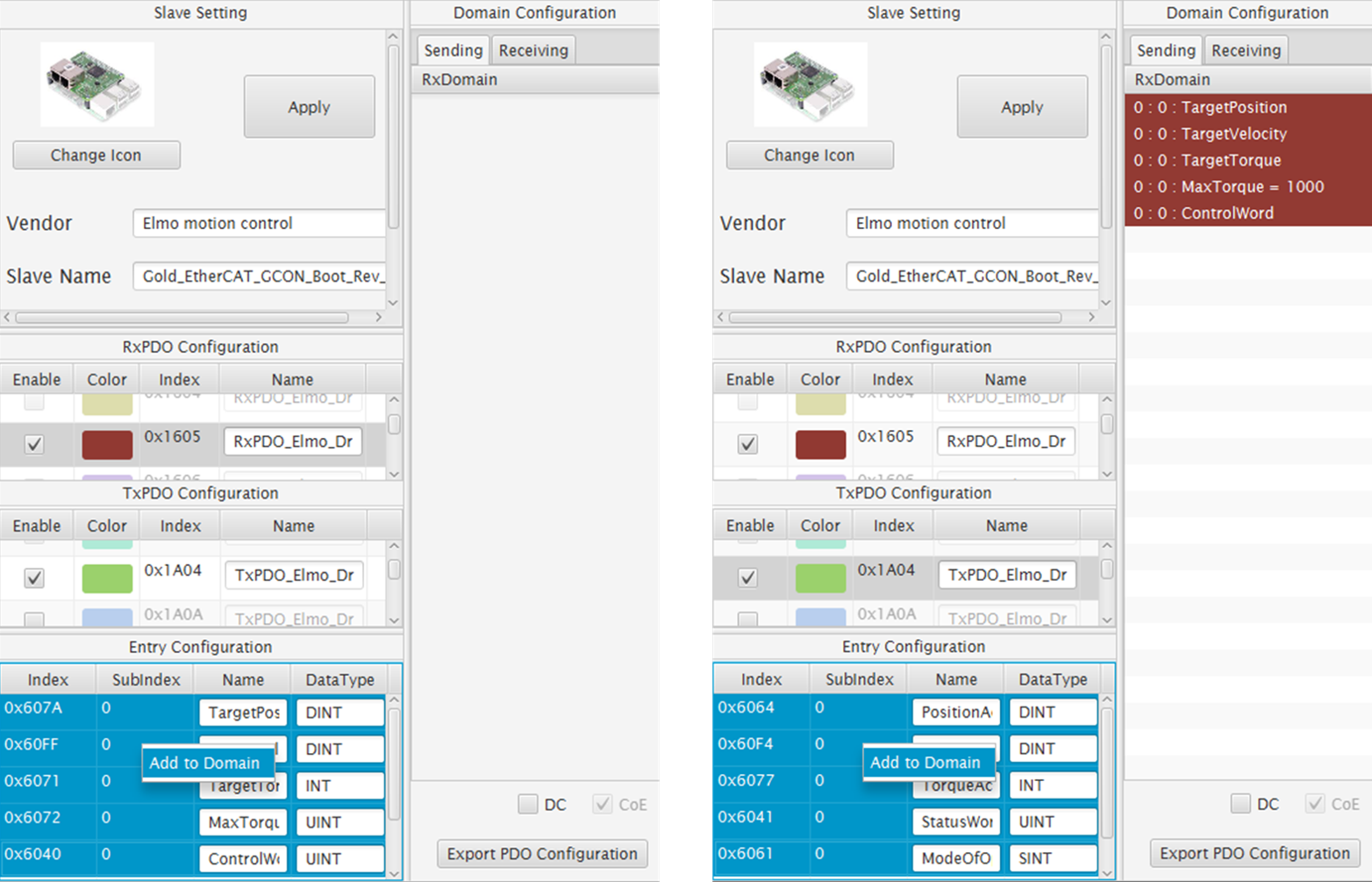
본 튜토리얼에서는 Elmo Gold Solo Whistle 만 EtherCAT 슬레이브이므로 이 부분만 간단히 설정하면 PDO 항목 설정은 완료됩니다. 따라서, 슬레이브 스캔 후 RxPDO 와 TxPDO 의 목록 중 위 그림과 같은 부분을 Enable 하고 전체 항목을 도메인에 추가하여 도메인 구성을 완료합니다. PDO 설정에 대한 자세한 내용은 CORE 예제의 6. PDO 항목 설정 및 도메인 구성 에서도 참고하실 수 있습니다.
5. 이클립스 환경의 EtherCAT 프로젝트 생성
환경 설정에 대한 자세한 내용은 CORE 예제의 7. 이클립스 환경의 EtherCAT 프로젝트 생성 에서 참고하시면 되며, 동일한 방식으로 진행하여 프로젝트를 생성할 수 있습니다.
6. EtherCAT 프로젝트 컴파일
EtherCAT 프로젝트를 이클립스에 불러오고 컴파일 하는 방법은 CORE 예제의 8. EtherCAT 프로젝트 컴파일 에서 참고하실 수 있습니다.
7. EtherCAT 어플리케이션 실행
EtherCAT 어플리케이션을 실행은 가속도 센서 예제와 동일하게 WinSCP 프로그램을 통해 파일을 STEP 에 전송하여 진행합니다. 실행 방법에 대한 자세한 내용은 7. EtherCAT 어플리케이션 실행 을 참고하십시오.
