CORE 설치
CORE 구조도
각 CORE 모듈은 5개의 하드웨어 파트로 구성됩니다.
- 1 하모닉 드라이브
- 1 모터
- 1 전자석 브레이크
- 1 앱솔루트 엔코더: 마그네틱 디스크 및 엔코더 보드
- 1 드라이버: 컨트롤러 보드 및 전원 보드
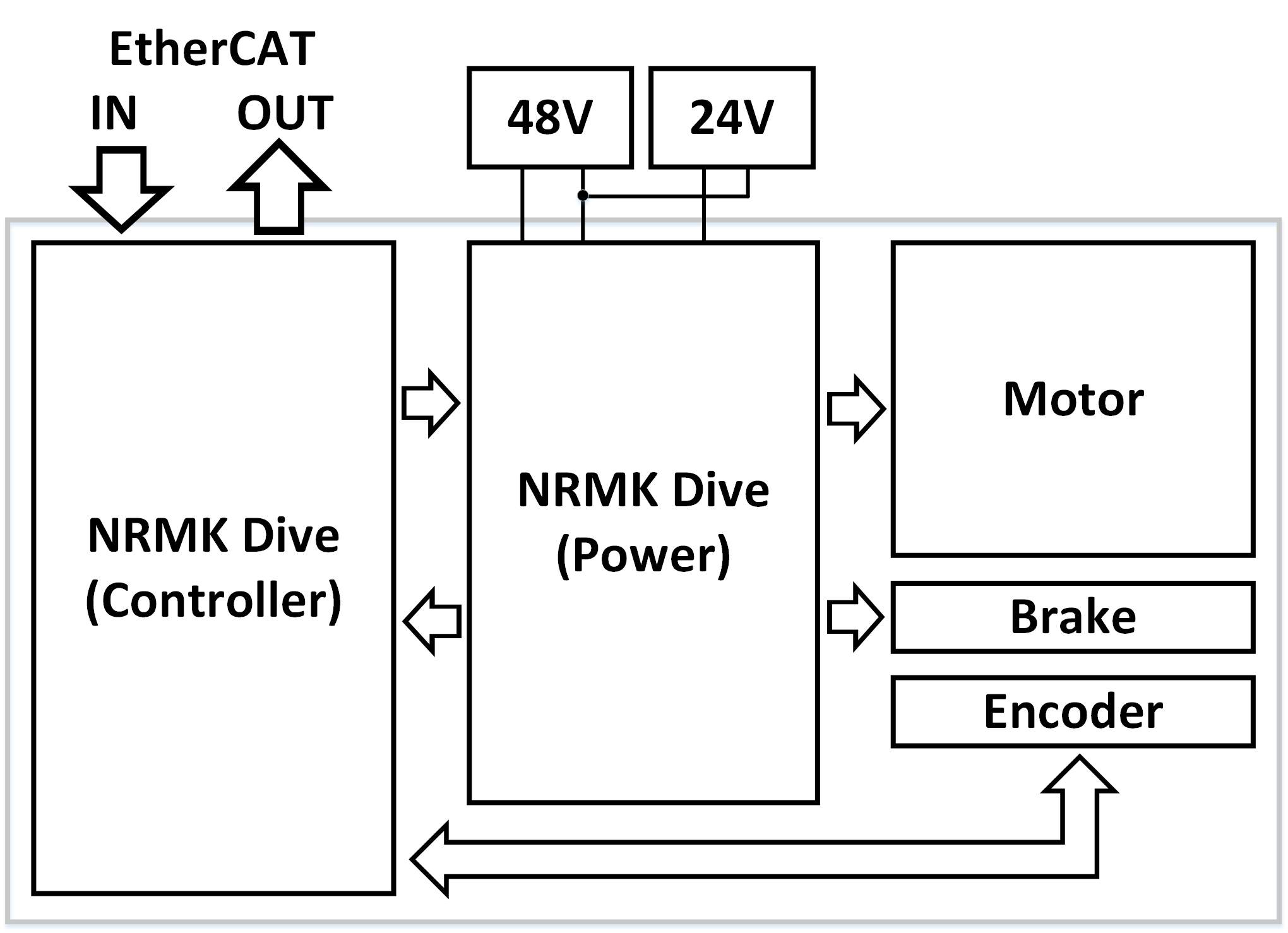
Figure 1. CORE 모듈 - 블락 다이어그램
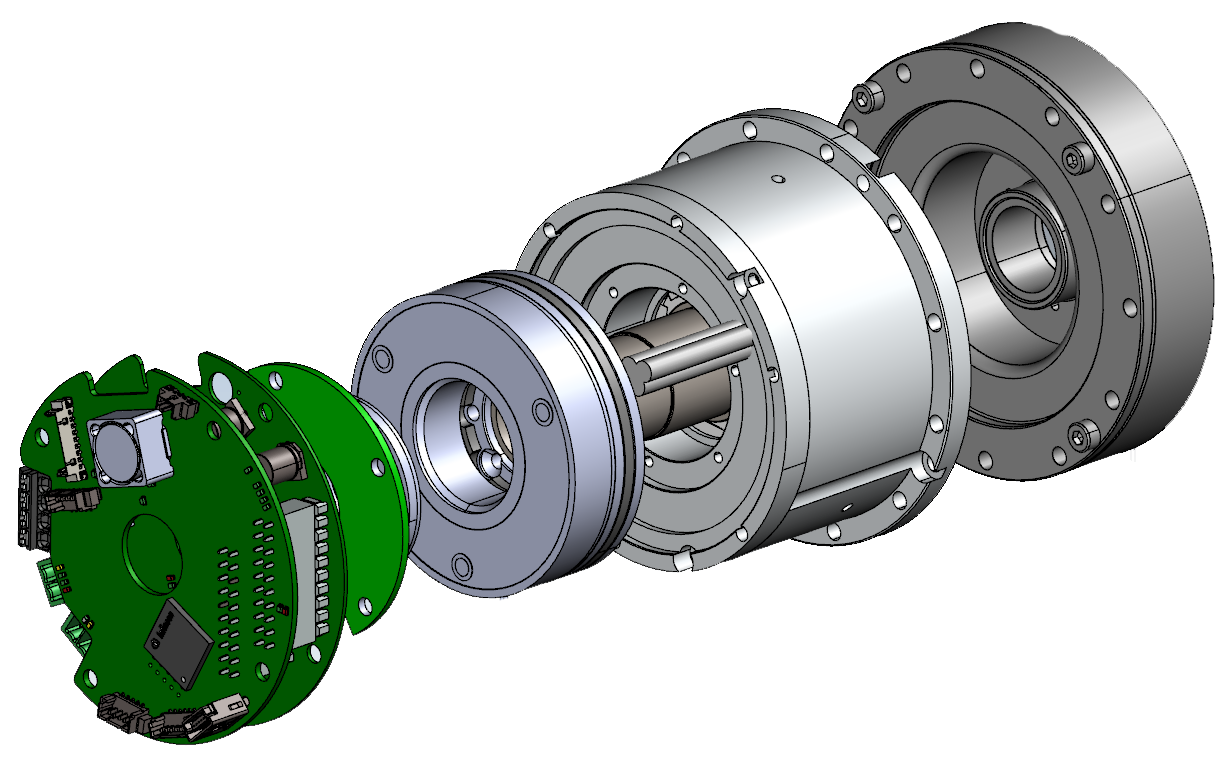
Figure 2. CORE100 - 기계 구조cture
배선 가이드
모터 드라이버
CORE의 드라이버는 컨트롤러 보드와 전원 보드를 포함합니다. 두 보드는 보드-보드 헤더로 샌드위치처럼 연결 되어 있습니다. 몇몇 신호는 컨트롤러 보드에, 다른 신호는 전원 보드에 연결 되어 있습니다. 컨트롤러 보드는 공통적으로 모든 CORE 모델에 사용되지만, 전원 보드는 CORE의 power에 따라 다릅니다.

Figure 3. CORE 모듈 드라이버ver
두 가지의 연결 종류가 있습니다.
-
내부 연결: 드라이버로부터 CORE 부품들로의 제어 신호, 피드백 신호 등
- 모터 3 상 연결n
- 브레이크 선
- 엔코더 신호
-
외부 연결: 사용자와 CORE 모듈 사이의 인터페이스
- 48V 주 전원 공급
- 24V 브레이크 전원 공급
- EtherCAT IN/OUT 포트
모터 드라이버 연결
CORE100/CORE200 드라이버의 커넥터
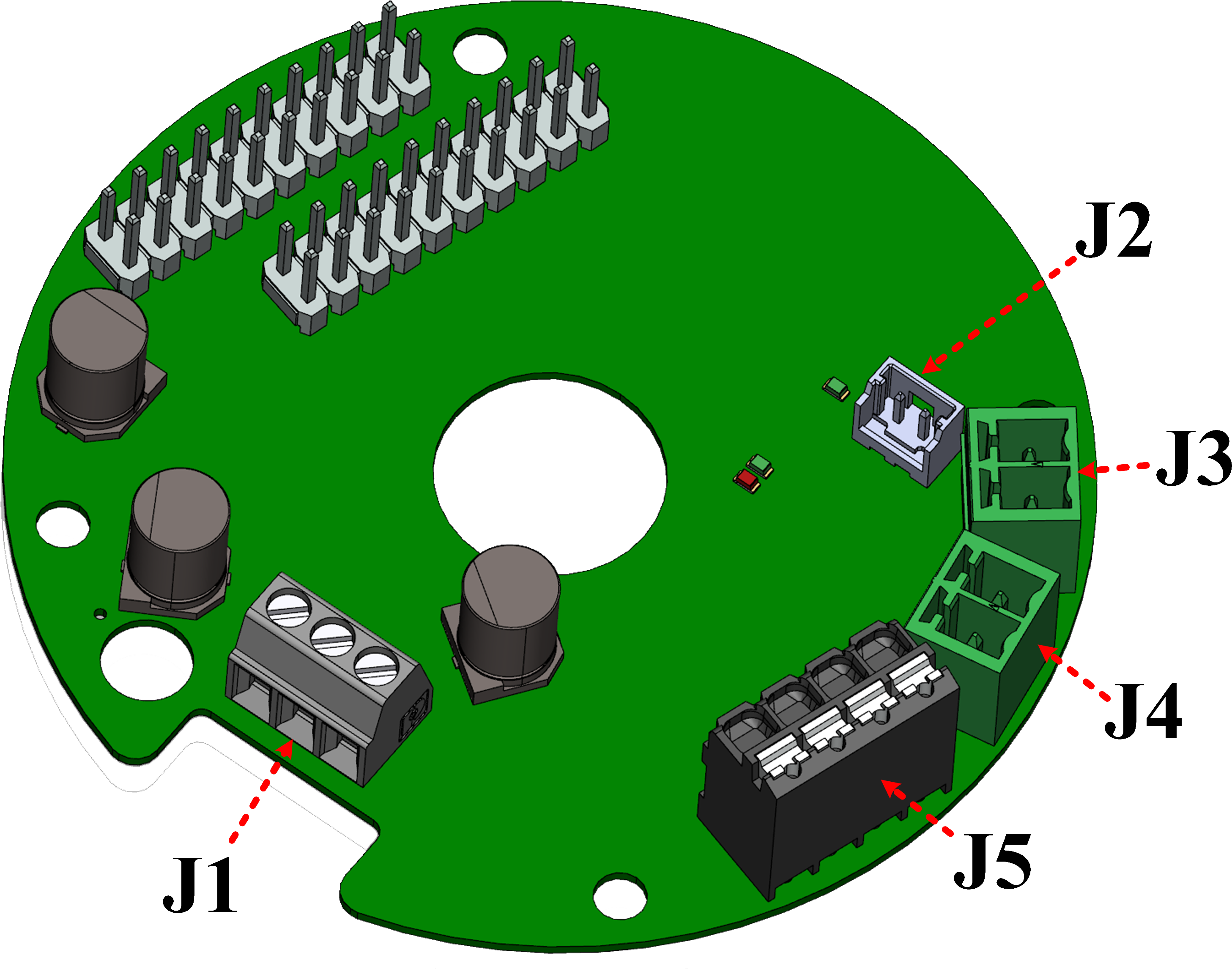
 Figure 4. CORE100/CORE200 커넥터
Figure 4. CORE100/CORE200 커넥터
| No. | 커넥터 | 핀 번호 | 설명 | 내부/외부 |
|---|---|---|---|---|
| 1 | J1 | 3 | 모터 위상 커넥터 | 내부 |
| 2 | J2 | 2 | 브레이크 선 | 내부 |
| 3 | J3 | 2 | 48V 전원 input | 외부 |
| 4 | J4 | 2 | 48V 전원 output | 외부 |
| 5 | J5 | 4 | 24V, 브레이크 free input-output | 외부 |
| 6 | J7 | 8 | 엔코더 | 내부 |
| 7 | J8 | 5 | EtherCAT IN 포트 | 외부 |
| 8 | J9 | 9 | EtherCAT OUT 포트 | 외부 |
| 9 | J10 | 6 | CAN 포트 | 사용하지 않음 |
| 10 | J11 | 4 | USB 포트 | 사용하지 않음 |
| 11 | J12 | 2 | 모터 온도 센서 | 사용하지 않음 |
Table 1. CORE100/CORE200 커넥터 설명
CORE500 커넥터
 Figure 5. CORE500 커넥터
Figure 5. CORE500 커넥터
| No. | 커넥터 | 핀 번호 | 설명 | 내부/외부 |
|---|---|---|---|---|
| 1 | J1 | 3 | 모터 위상 커넥터 | 내부 |
| 2 | J2 | 2 | 브레이크 선 | 내부 |
| 3 | J3 | 2 | 48V 전원 input | 외부 |
| 4 | J4 | 2 | 48V 전원 output | 외부 |
| 5 | J5 | 2 | 24V, 브레이크 free input | 외부 |
| 6 | J6 | 3 | 24V, 브레이크 free output | 외부 |
| 7 | J7 | 8 | 엔코더 | 내부 |
| 8 | J8 | 5 | EtherCAT IN 포트 | 외부 |
| 9 | J9 | 9 | EtherCAT OUT 포트 | 외부 |
| 10 | J10 | 6 | CAN 포트 | 사용하지 않음 |
| 11 | J11 | 4 | USB 포트 | 사용하지 않음 |
| 12 | J12 | 2 | 모터 온도 센서 | 사용하지 않음 |
Table 2. CORE500 커넥터 설명
모터 - 브레이크 연결
아래의 다이어그램은 CORE 드라이버와 모터 & 브레이크의 연결을 보여줍니다.
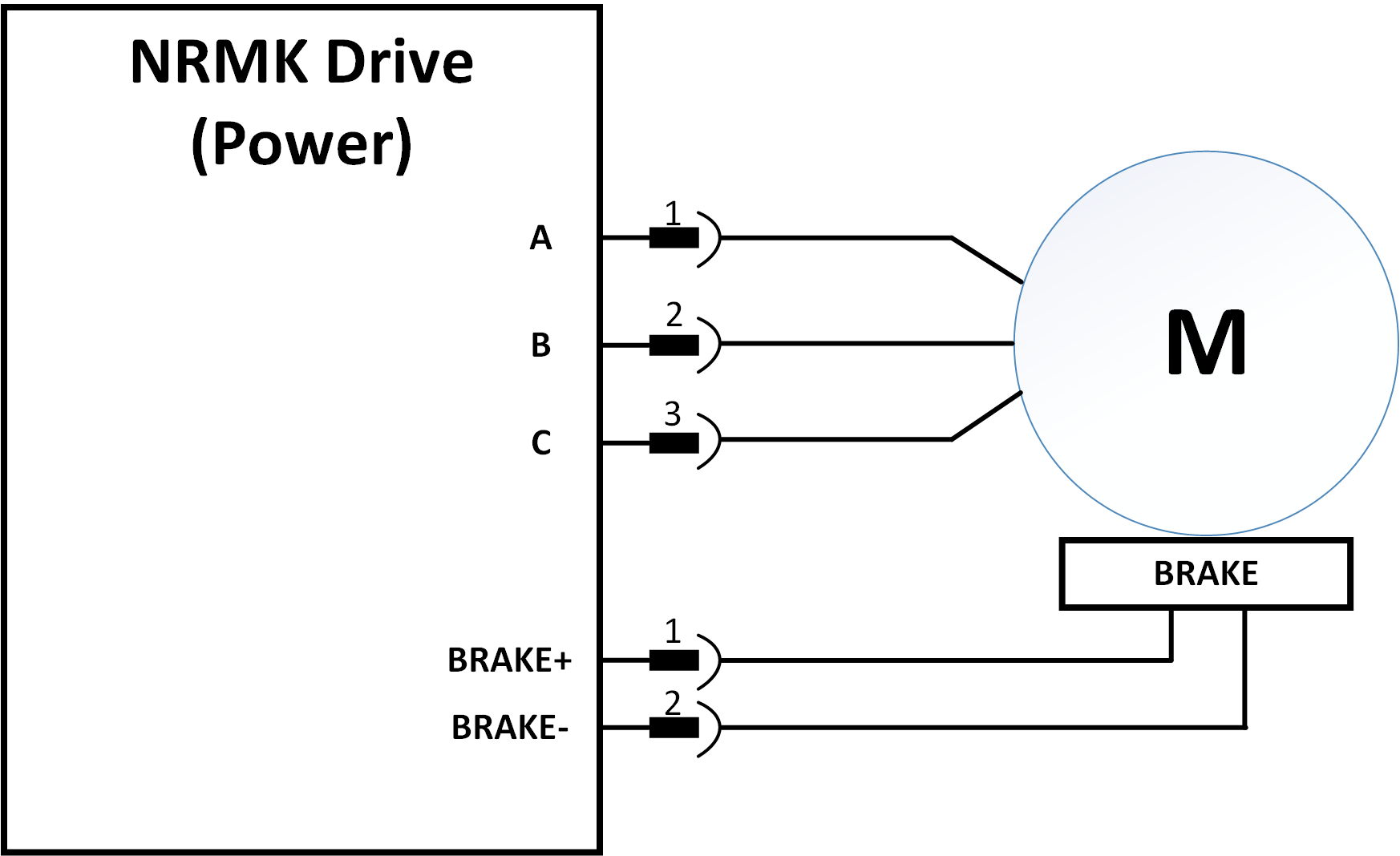 Figure 6. 모터 -브레이크 연결 다이어그램
Figure 6. 모터 -브레이크 연결 다이어그램
모터 연결 3가지 모터 위상 터미널들은 다음 순서와 같이 전원 보드에 곧바로 연결됩니다.
| 핀 번호 (J1) | 모터 위상 |
|---|---|
| 1 | U |
| 2 | V |
| 3 | W |
Table 3. 모터 커넥터 핀
브레이크 연결
| 핀 번호 (J2) | 브레이크 선 |
|---|---|
| 1 | Br+ |
| 2 | Br- |
Table 4. 브레이크 커넥터 핀
PCB 위 모터 - 브레이크 커넥터
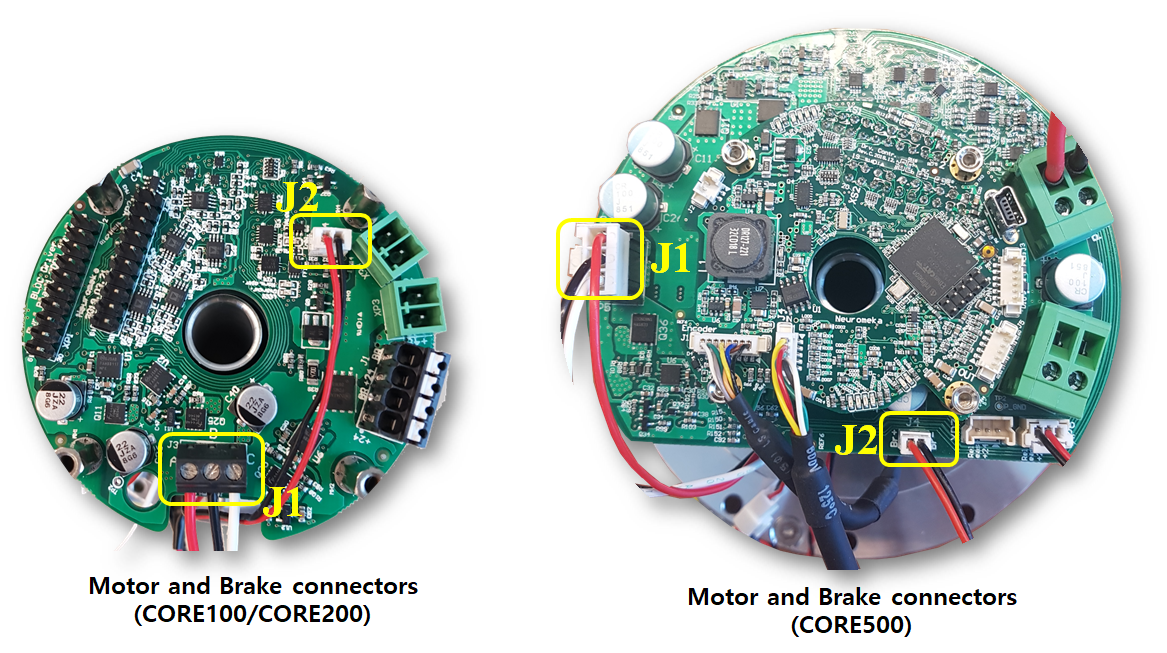 Figure 7. 모터 - 브레이크 커넥터
Figure 7. 모터 - 브레이크 커넥터
엔코더 연결
앱솔루트 엔코더는 컨트롤러 보드(J7)에 연선으로 연결됩니다. 멀티 턴 데이터를 사전 설정하는데 사용되는 PRESET 라인은 연결되어 있지 않다는 점에 유의하십시오. 아래의 다이어그램은 엔코더와 컨트롤러 보드의 연결을 나타냅니다.
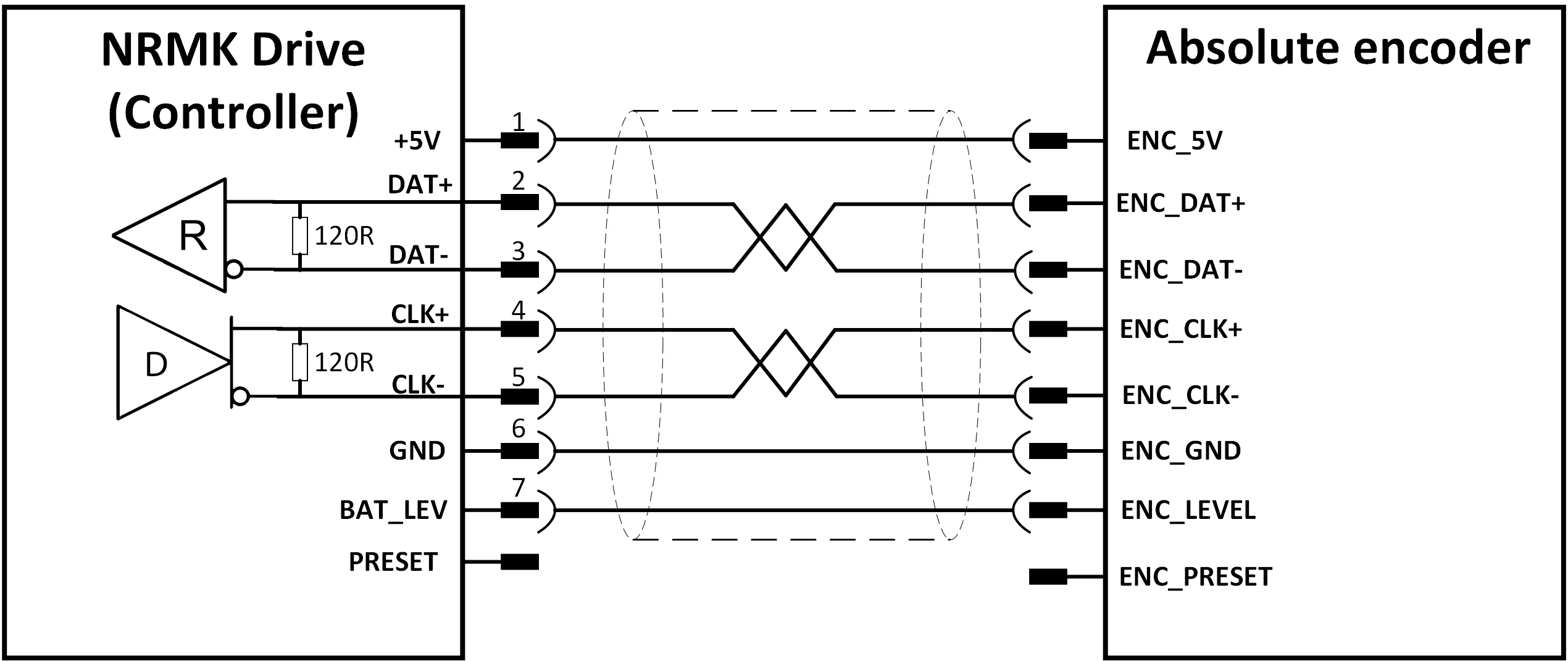 Figure 8.엔코더 연결 다이어그램
Figure 8.엔코더 연결 다이어그램
엔코더 커넥터 핀:
| 핀 번호 (J7) | 엔코더 선 |
|---|---|
| 1 | 5V supply |
| 2 | DATA+ |
| 3 | DATA- |
| 4 | CLOCK+ |
| 5 | CLOCK- |
| 6 | GND |
| 7 | Battery level |
| 8 | PRESET (unused) |
Table 5. 엔코더 커넥터 핀
PCB 위 엔코더:
 Figure 9. 엔코더 커넥터
Figure 9. 엔코더 커넥터
전원 장치(PS)
CORE 실행을 위해 두 가지 전원 장치가 필요합니다.
- 메인 모터와 드라이버의 전원 공급 장치는 48V입니다.
- 브레이크 구동을 위해 추가적인 24V 전원 장치가 필요합니다.
두 가지 전원 장치는 공통 접지를 가져야 합니다. 사용자는 CORE 모듈의 정격 전류보다 1A이상 큰 전원 장치를 메인 48V 전원 장치로 사용해야 합니다. 24V 전원 장치의 공급 전류는 0.5보다 커야 합니다.
전원 장치 연결은 아래의 다이어그램과 같습니다.
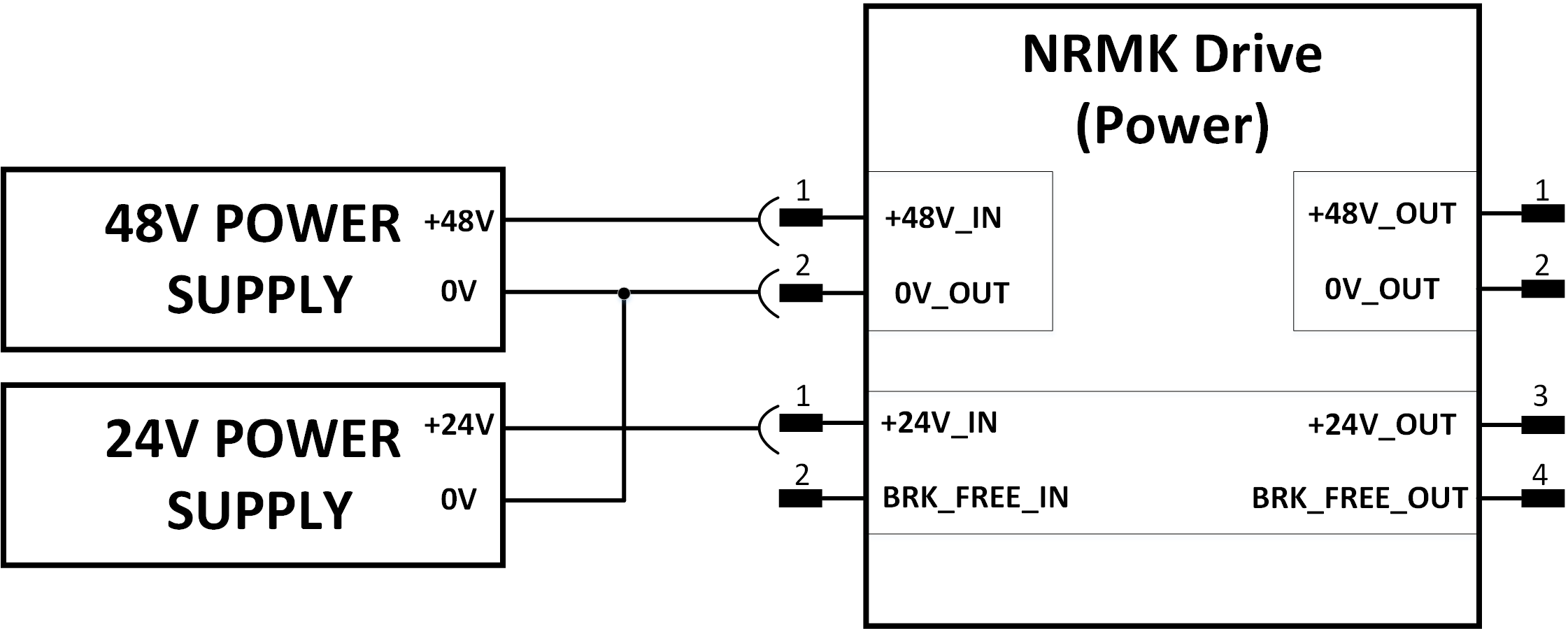
48V 전원 장치 커넥터 핀:
| 핀 번호 (J3, J4) | Power 선 |
|---|---|
| 1 | +48V |
| 2 | 0V |
Table 6. 48V 전원 장치 커넥터 핀
브레이크 전원 장치 커넥터 핀 (CORE100/CORE200):
| 핀 번호 (J5) | Power 선 |
|---|---|
| 1 | +24V IN |
| 2 | Brake free IN |
| 3 | +24V OUT |
| 4 | Brake free OUT |
Table 7. 브레이크 전원 장치 커넥터 핀 (CORE100/CORE200)
브레이크 전원 장치 커넥터 핀 (CORE500):
| 핀 번호 (J5, J6) | Power 선 |
|---|---|
| 1 | PE |
| 2 | +24V |
| 3 | Brake free |
Table 8. 브레이크 전원 장치 커넥터 핀 (CORE500)
PCB 위 전원 장치 커넥터:
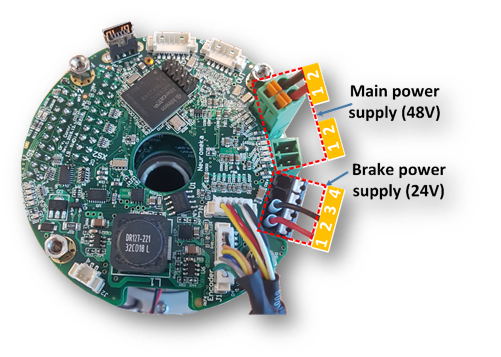 Figure 11. CORE100/CORE200의 전원 장치 커넥터
Figure 11. CORE100/CORE200의 전원 장치 커넥터
 Figure 12. CORE500의 전원 장치 커넥터
Figure 12. CORE500의 전원 장치 커넥터
EtherCAT 연결
컨트롤러 보드위에는 입력과 출력 신호를 위한 두가지 EtherCAT 커넥터가 있습니다. 각 커넥터는 Tx+/Tx-, Rx+/Rx-와 shield의 5가지 핀을 가집니다.
EtherCAT IN 은 이전 장치(마스터)와의 커넥터이고 EtherCAT OUT 는 다음 장치 혹은 이중화 토폴로지의 마스터에 연결됩니다.
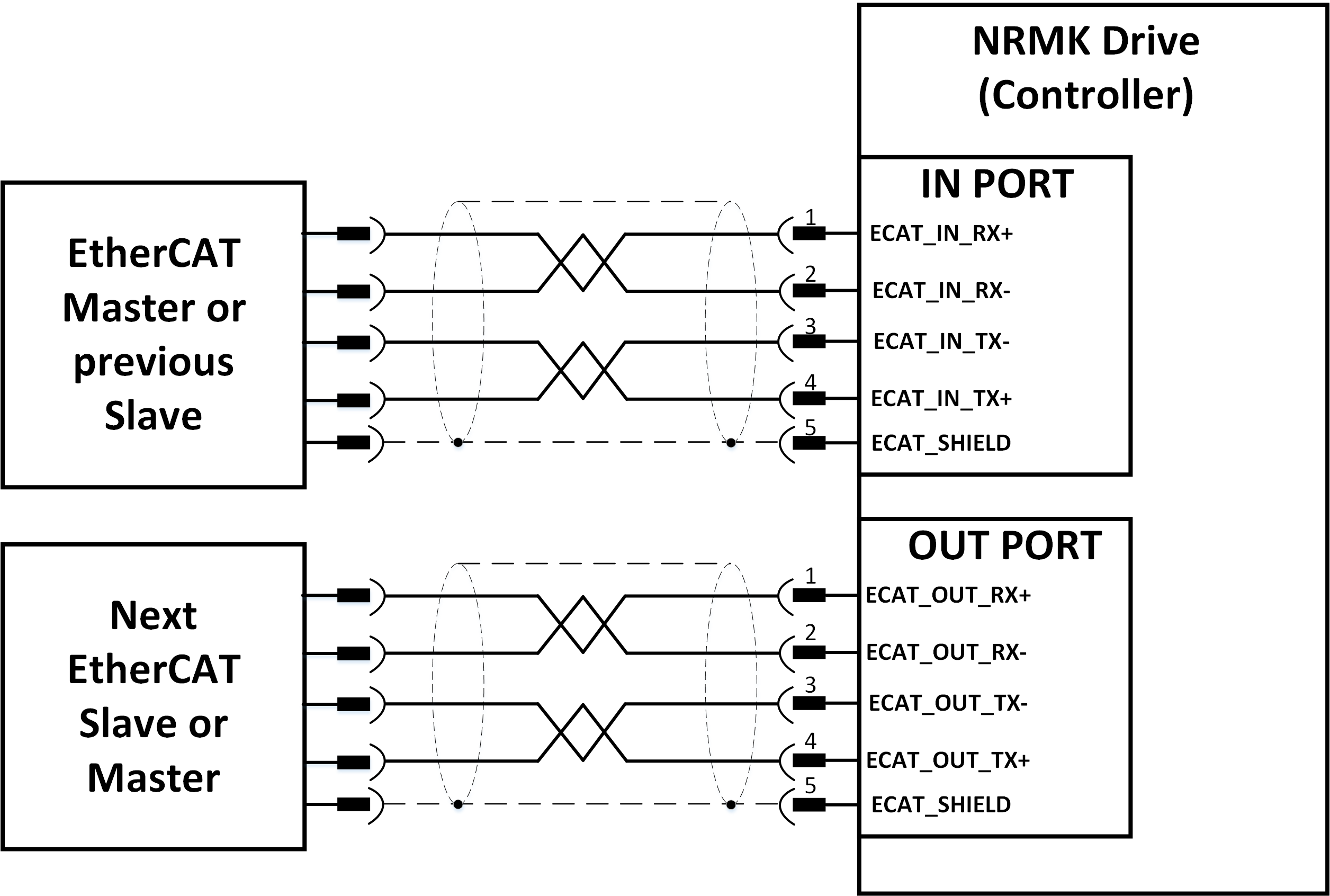 Figure 13. CORE와 다른 EtherCAT 장치 사이의 EtherCAT 연결
Figure 13. CORE와 다른 EtherCAT 장치 사이의 EtherCAT 연결
주의:
EhterCAT 포트를 바꾸지마세요. IN 포트는 OUT 포트가, OUT 포트는 IN 포트가 됩니다.
만약 두 EtherCAT 포트가 바뀔 경우, 장치는 여전히 작동하나 네트워크 토폴로지는 바뀔것입니다.
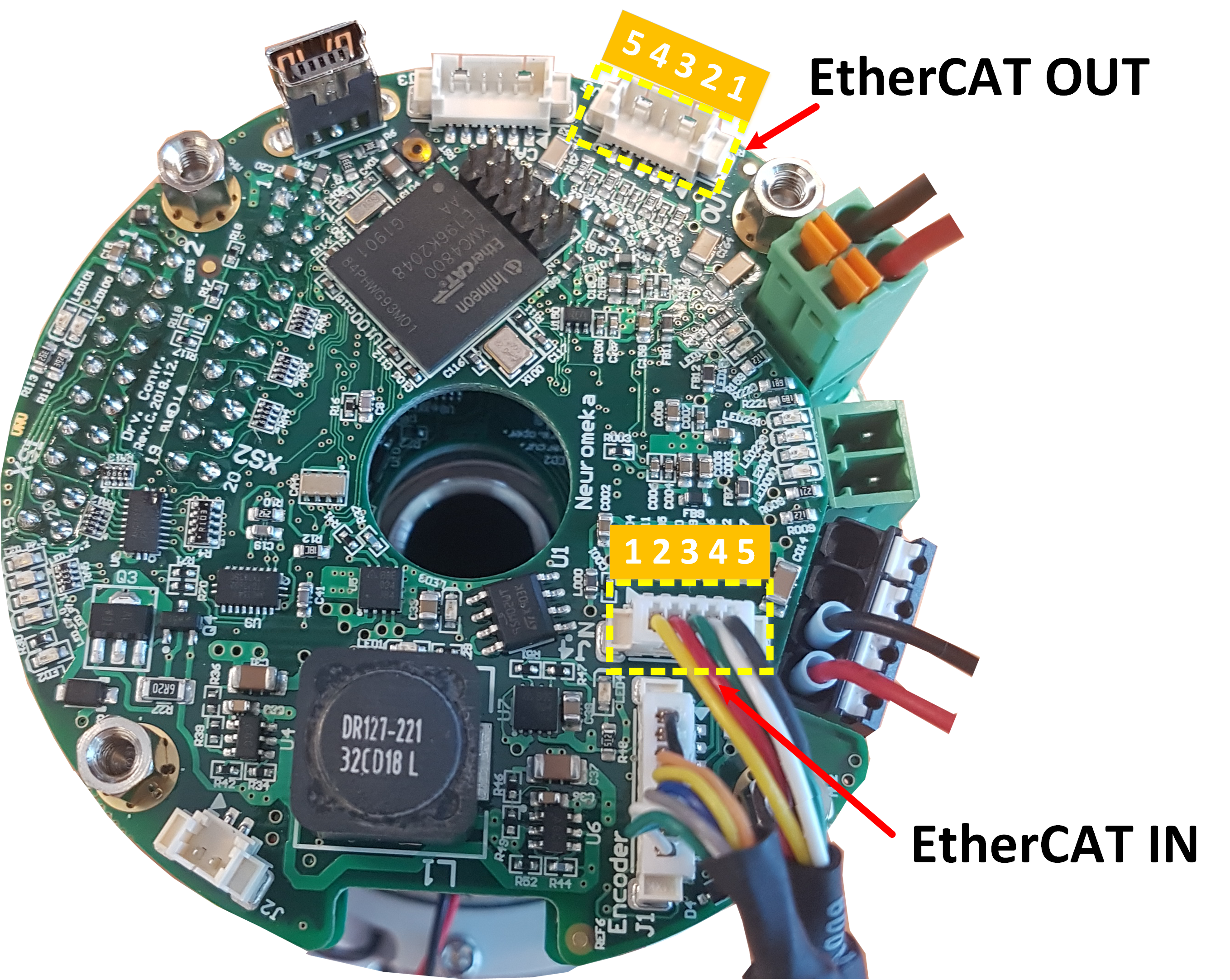 Figure 14. 컨트롤러 보드 위 EtherCAT 커넥터
Figure 14. 컨트롤러 보드 위 EtherCAT 커넥터
| 핀 번호 (J8, J9) | 신호 |
|---|---|
| 1 | Rx+ |
| 2 | Rx- |
| 3 | Tx- |
| 4 | Tx+ |
| 5 | Shield |
Table 9. EtherCAT 커넥터 핀 설명
