TwinCAT 튜토리얼
서론
- 이번 장에서는 TwinCAT 3.x 및 Visual Studio 2010(또는 기타 호환 버전)을 사용한 CORE 모듈의 테스트를 보여줍니다.
- Windows PC에서 작동하는 TwinCAT 3.x와 TwinCAT용 네트워크 드라이버가 설치되어 있어야 합니다.
TwinCAT 3 프로젝트 생성하기
- 시작 페이지에서 "New TwinCAT Project …"을 선택하세요.
- File ⇨ New ⇨ Project 으로 프로젝트를 생성할 수 있습니다.(기존 프로젝트 템플릿이 모두 표시됨)
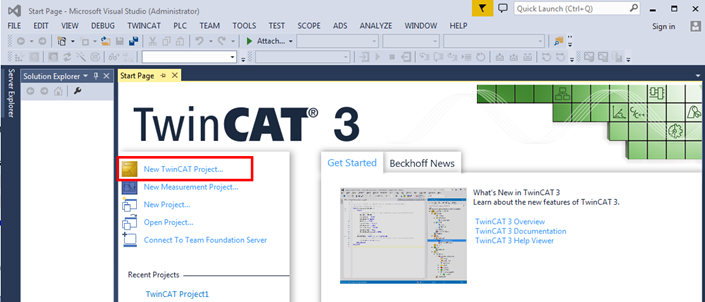 Figure 1. TwinCAT3 - 새로운 프로젝트
Figure 1. TwinCAT3 - 새로운 프로젝트
- "TwinCAT XAE Project"을 선택하세요; 적당한 프로젝트이름을 입력
- "OK" 클릭
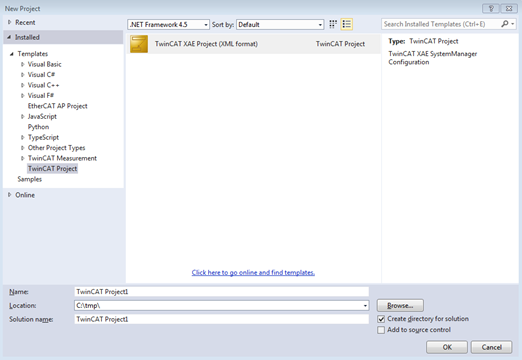
Figure 2. TwinCAT3 - 프로젝트 환경 설정
시스템 검색
-
장치 검색
- Device 우클릭 ⇨ Scan.
- 그러면, 모든 모듈이 표시됩니다.

Figure 3. TwinCAT3 프로젝트 - CORE 모듈 검색참고: 검색 전, 코어 모듈을 위한 ESI 파일은 적절한 TwinCAT 위치에 추가되어야 합니다. 또한, TwinCAT 드라이버는 네트워크 인터페이스 카드(Ntework Interface Card, NIC)를 위해 설치 되어야 합니다. 지침은 "Setting tips" 섹션을 참조하세요.
- 만약 CORE 모듈이 적절하게 연결되었을 경우, 새로운 'Box', Box1(NRMK Drive)가 장치 목록에 추가되어 나타납니다. Box 1을 더블 클릭하여 기본 정보를 확인하세요.
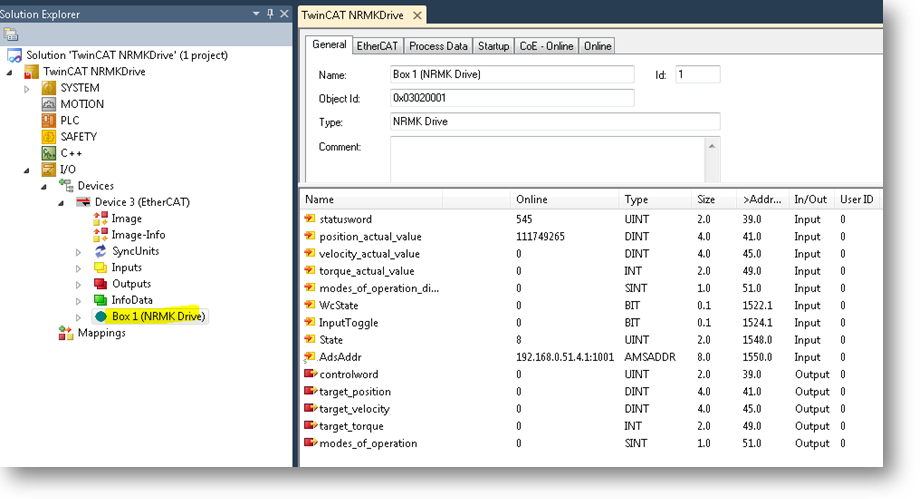
Figure 4. TwinCAT3 프로젝트 - 검색 결과
-
SDO & PDO 정보
- CoE – Online 탭을 클릭하여 더 상셍한 EtherCAT 정보를 확인하세요.
- 상단 영역은 드라이브의 모든 객체들을 보여줍니다.
- 하단 영역은 기본 맵핑된 PDO 객체입니다.

Figure 5. TwinCAT3 프로젝트 - CORE EtherCAT SDO

Figure 6. TwinCAT3 프로젝트 - CORE EtherCAT PDO
Servo-On
- 'Online' 탭을 클릭하여 드라이브 장치가 OP 모드에 있는지 확인하세요
- PDO 객체 영역에서, statusword is 545 (0x211) 드라이브의 초기값은 Ready to switch on 상태입니다.
- controlword 객체를 우클릭하여 Online Write 를 선택하고 controlword (transition 3)에 값 7 을 할당하세요.
- 드라이브는 이제 statusword = 563 (0x233) 의 Switch on 상태입니다.
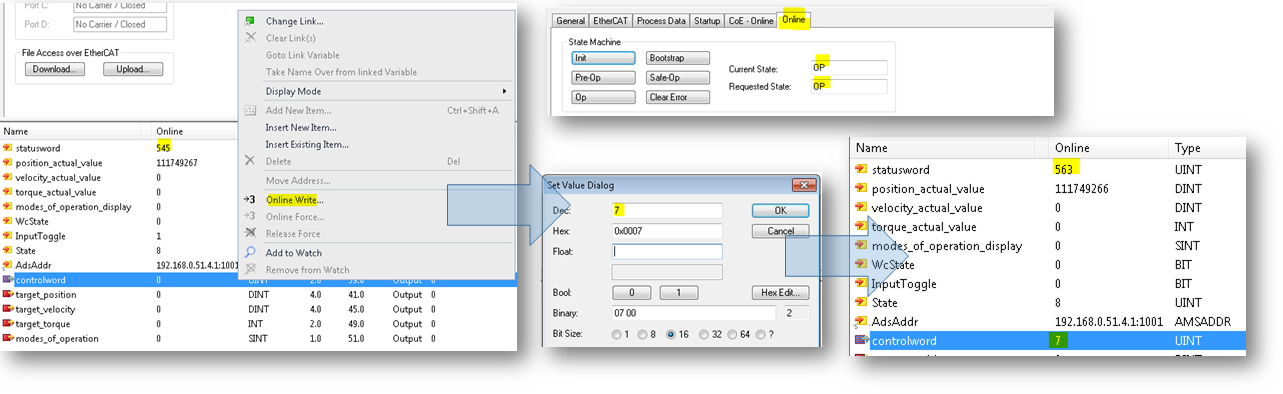
Figure 7. TwinCAT3 프로젝트 - Servo On
실행
- 드라이브를 사용하기 전에, 작동 모드를 Torque Mode (CST) 로 변경해야 합니다. mode_of_operation 객체를 우클릭하여, Online Write 을 선택하고 10 을 입력하여 CST모드로 변경하세요.
- 이전 단계를 반복하여 controlword 에 새로운 값 15 (0x0F) 을 할당하고 transition 4 실행하세요.
- 드라이브는 이제 statusword = 567 (0x237), mode_of_operation = 10 (CST) 의 Operation enable 상태입니다.
-
적당한 값(예. 96)으로 target_torque 을 할당하고, CORE는 작동중입니다.
중요: 이 과정에서, CORE는 움직이므로, CORE에 아무런 장애물이 없도록 하세요. CORE가 과속하지 않도록, 너무 큰 target_torque 값을 입력하지 마세요.
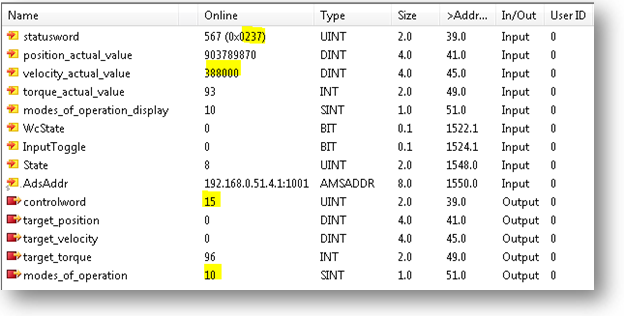
Figure 8. TwinCAT3 프로젝트 - CORE의 PDO 작동 값
