Indy 7에 툴 장착하기
요구 환경
-
Ubuntu 16.04 및 ROS Kinetic 이상 이 설치된 PC
-
indy-ros 및 indy-ros-examples 소스코드 설치
위 요구 환경의 설치가 완료되지 않은 경우 설치를 먼저 진행하여 주십시오.
실행 방법
1. 터미널 열기
2. ROS 환경설정 확인하기
ROS 명령어를 정상적으로 사용하기 위하여 terminal 의 환경에 ROS 환경변수를 추가 할 필요가 있습니다. 아래의 명령어로 추가할 수 있으며, 설치에서 설명한 bashrc에 해당 명령어들이 추가되어 있을 경우, 이 과정을 생략 할 수 있습니다.
1 2 | |
example.
1 2 | |
3. 명령어 실행하기
1 | |
실행결과, 아래 2개의 창이 실행되는 것을 확인 할 수 있습니다.
indy7의 경우와 마찬가지로 joint_states_publisher의 각 조인트 포지션 값을 조정해 rviz에 표시되는 로봇의 자세를 바꿀 수 있습니다.
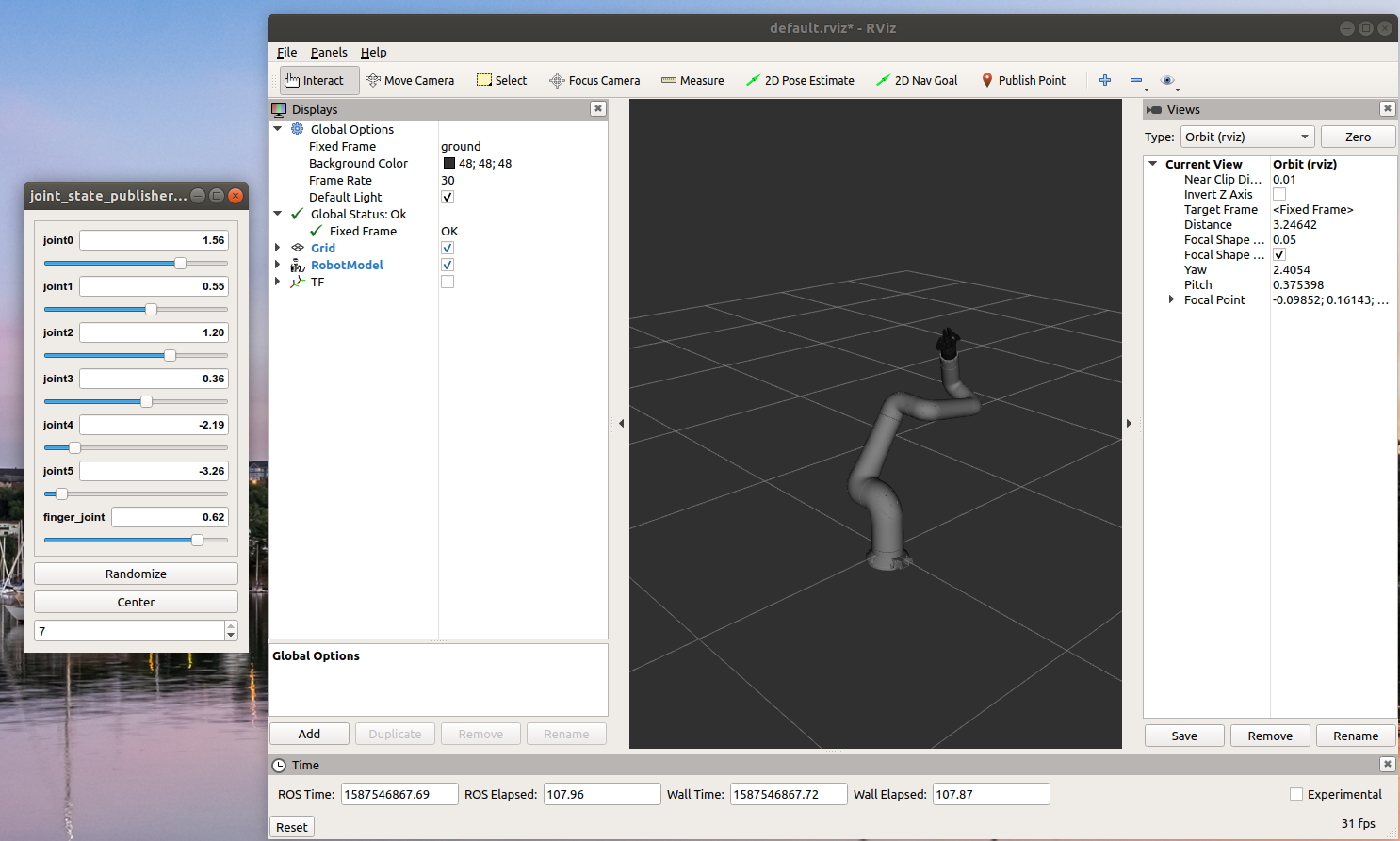
패키지 구성과 런치파일의 구성은 indy7 의 경우와 동일합니다.
로봇 모델
위와 같이 로봇 핸드를 장착한 로봇 모델을 Rviz에서 불러오기 위해서는 툴, 로봇, 톨과 로봇의 연결정보를 담고있는 xacro 파일이 필요합니다.
아래의 코드는 indy7_robotiq.xacro의 전문입니다.
1 2 3 4 5 6 7 8 9 10 11 | |
robotiq 핸드의 경우 공식으로 배포되는 xacro 파일이 존재합니다. 툴의 xacro 파일이 이미 존재하는 경우 위와같은 짧은 코드로 간단히 indy7에 부착하는것이 가능합니다.
-
xacro:include : 이미 존재하는 xacro 파일을 읽어들입니다. 위 코드에서는 indy7_description 패키지의 indy7_fixed.xacro와 툴 모델인 robotiq_arg85_description.xacro을 읽어오고 있습니다.
-
joint : 읽어들인 두 xacro 파일의 링크를 연결하는 Joint 를 설정합니다.
