시작하기

인디아이 (IndyEye) 는 협동로봇을 위한 저가형 비전 솔루션으로, 다양한 이미지 프로세싱 모듈을 활용하여 비전문가도 물체를 쉽게 인식하고 이를 픽 앤 플레이스 작업 등에 적용할 수 있습니다. 인디아이는 로봇 일체형으로 제공되며, 인디아이 전용 안드로이드 앱을 통해 인터페이스를 구성할 수 있습니다.
인디아이 설치
현재 인디아이는 세 가지 버전으로 제공될 수 있습니다.
- 별도형 IndyEye: 별도 PC 형태로 제공되며, 카메라는 해당 PC의 USB 포트에 직접 연결됩니다. IndyCB와는 공유기 등의 로컬 네트워크를 통해 통신합니다.
- IndyEye-LITE: IndyCB 일체형으로, IndyEye-LITE 로고가 추가되어 있으며 IndyCB의 일반 USB 포트를 통해 카메라를 연결할 수 있습니다.
- (2023년 이전) IndyCB 내장형 IndyEye: IndyCB 에는 IndyEye 로고와 카메라용 USB 포트가 추가되어 있습니다.
인디아이의 설치 방법은 다음과 같습니다.
- 일체형 로봇 하단의 USB 포트를 위의 각 버전별 설명에 따라 IndyEye에 연결하십시오.
- 인디아이 앱과의 연결을 위해 IndyCB (및 IndyEye) 의 LAN 포트에 랜선을 연결하고 네트워크를 구성하십시오.
- 태블릿에 제공 된 설치 파일로 인디아이 앱을 설치하십시오.
인디아이 연결
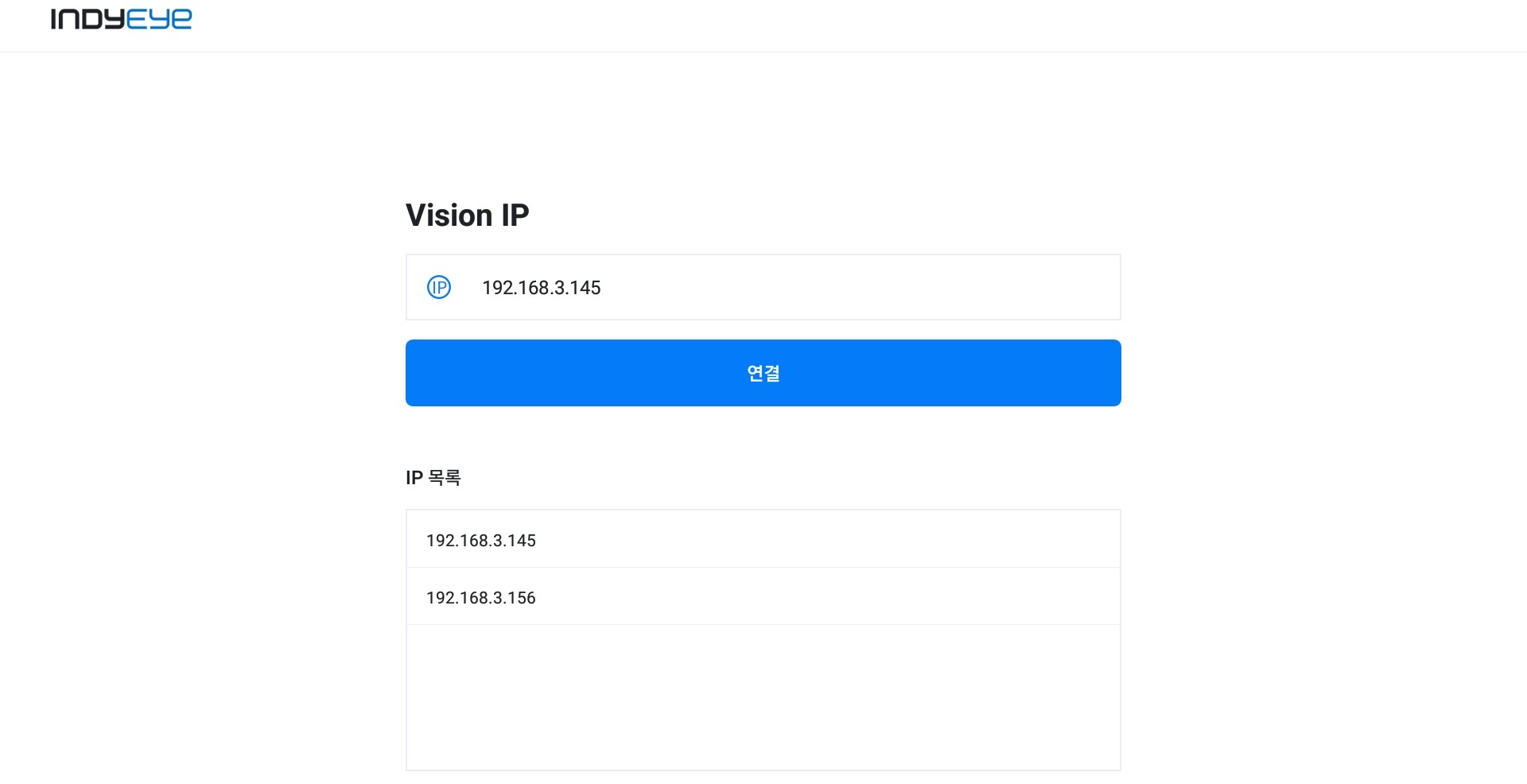
인디아이 앱 메인 화면
설치 완료 후, IndyCB 의 전원을 켜 로봇을 작동시킵니다. 인디아이 설정에는 전용 앱이 사용되며, 설치된 인디아이 앱의 메인 화면에서 IndyEye IP 주소를 입력하여 접속합니다.
- 별도형 IndyEye: 별도로 제공된 해당 PC의 IP를 사용합니다. 네트워크 상 이름은 indyeye 입니다.
- IndyEye-LITE: IndyCB의 IP를 사용합니다. 네트워크 상 이름은 STEP-TP 입니다.
- (2023년 이전) IndyCB 내장형 IndyEye: IndyCB의 IP를 사용합니다. 네트워크 상 이름은 STEP-TP 입니다.
IP는 IP 스캔 도구 (Advanced IP Scanner) 를 사용하여 위의 네트워크상 이름에 해당하는 IP를 검색합니다. 위 그림과 같이 Vision IP 란에는 검색한 IP를 입력하고 연결 버튼을 클릭합니다. IP 목록에서는 최근 접속한 내역을 확인하실 수 있습니다.
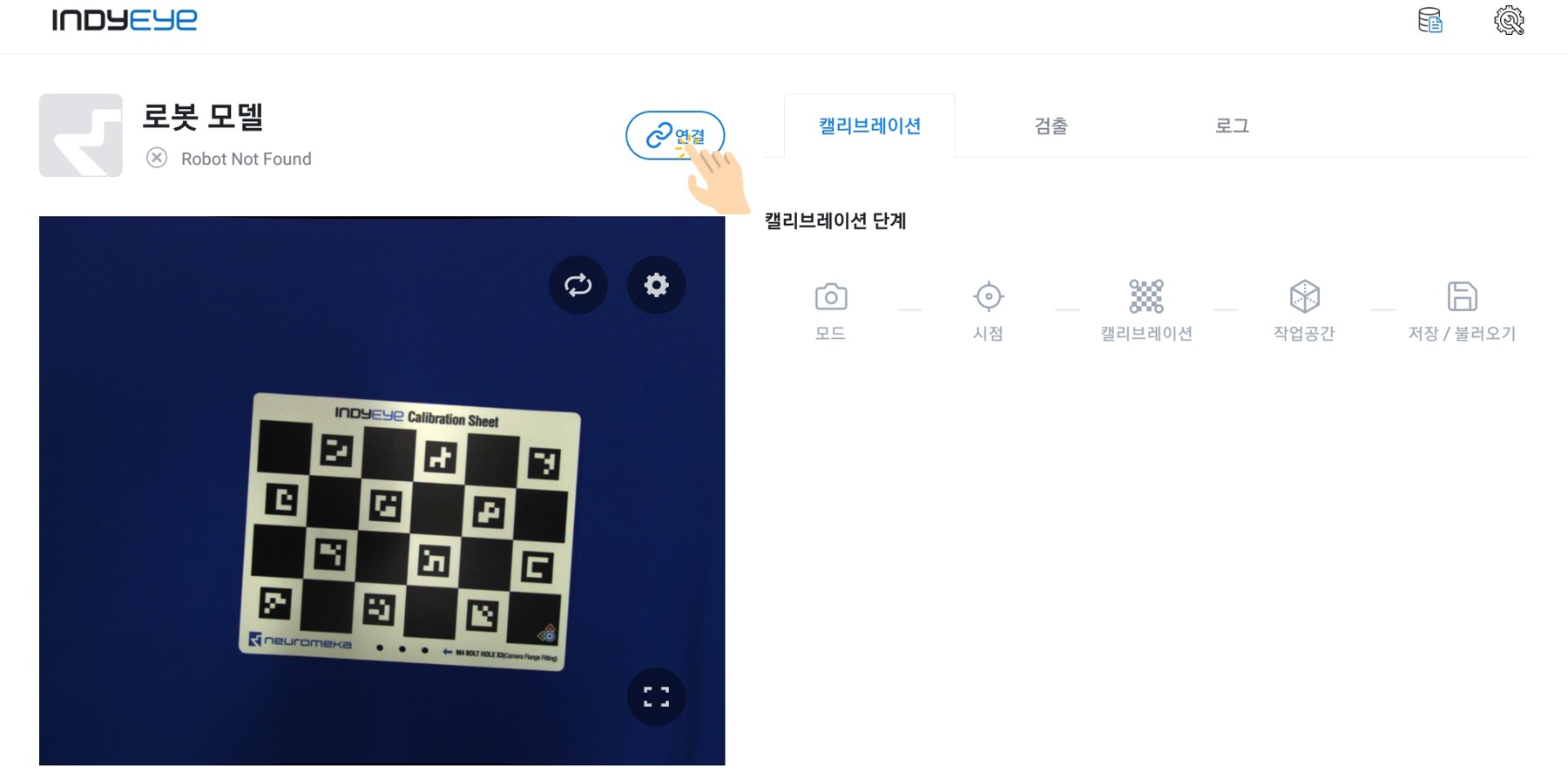
인디아이 연결 화면
인디아이를 연결하면 앱 화면 좌측에 카메라 영상이 자동으로 표시 됩니다. 연결이 끊어졌거나 노출 설정을 자동 조절해야 할 경우에는 화면 우측 상단의 새로 고침 아이콘을 클릭해주십시오. 상세 영상은 화면 우측 하단의 전체 화면 아이콘을 클릭하여 확인하실 수 있습니다.
로봇 연결
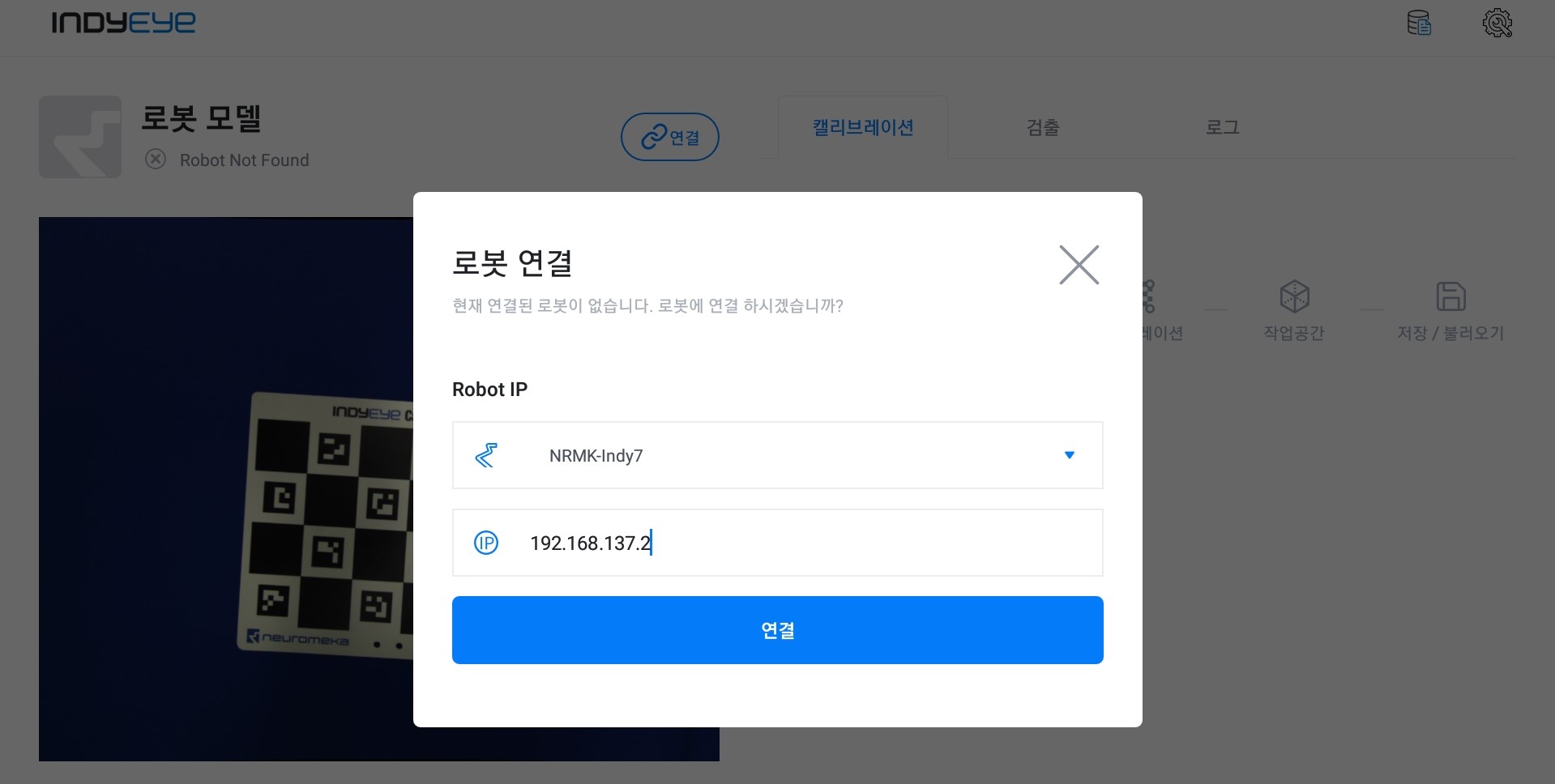
로봇 연결 화면
앱 화면 좌측 상단에는 로봇 연결 설정 부분이 있습니다. 인디아이와 로봇을 활용하여 캘리브레이션과 물체의 위치 인식 알고리즘을 구성을 수행하기 위해서는 로봇과의 연결이 유지되어야 합니다. 캘리브레이션 및 물체의 위치 인식 구성 및 테스트가 완료된 뒤, Conty 앱 혹은 외부 프로그램을 통해 연동하는 단계에서는 로봇 연결을 유지하지 않아도 됩니다.
먼저, 연결 버튼을 클릭합니다. 아래 그림의 화면이 팝업 창으로 표시되면, 로봇 모델을 드롭다운 항목에서 선택하고, IP 입력하고 연결 버튼을 클릭합니다.
- IndyCB와 별도로 설치된 IndyEye PC 혹은 IndyEye-LITE 버전을 사용하고 계시다면, IndyCB의 IP를 입력해주세요. Conty 앱에 접속하실 때 사용하시는 IP와 동일합니다.
- 2023년 이전에 생산된 IndyEye CB를 사용하고 계시다면, IndyCB에 별도의 camera 포트가 있는지 확인하세요. 이 경우, IndyEye 프로세서와 IndyCB의 주소는 내부에서 분리되어 있습니다. 192.168.137.2를 입력해주세요.
- IndyCB에 별도의 camera 포트가 없고 IndyEye PC를 별도로 갖고 계시지 않다면, 가지고 계신 버전은 IndyEye-LITE입니다 (IndyEye-LITE: 별도 주소가 없는 IndyCB 일체형).
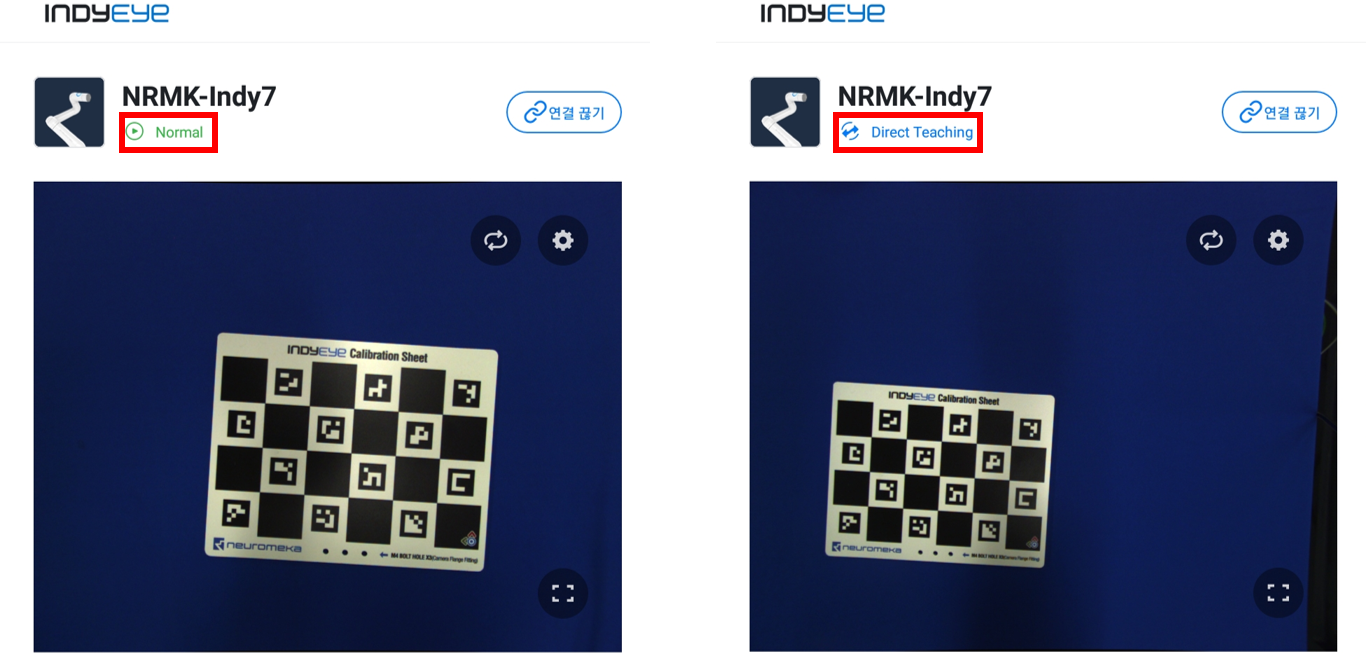
직접 교시 모드 변경
정상적으로 연결 된 후에는 로봇 로고와 함께 Normal 로 표시되며, Normal 버튼 클릭 시 직접 교시 모드로 전환이 가능합니다. 캘리브레이션 과정 중 또는 잠시 로봇의 위치를 변경해야 할 때 위 버튼만으로 모드를 쉽게 변경할 수 있습니다.
캘리브레이션
기본으로 제공되는 캘리브레이션 시트를 여러 방향에서 촬영함으로써 캘리브레이션을 진행할 수 있습니다. 먼저, 캘리브레이션 시트를 아래 그림과 같이 배치하고, 캘리브레이션 탭의 모드에서 장착된 카메라가 선택되어 있는 지 확인합니다.
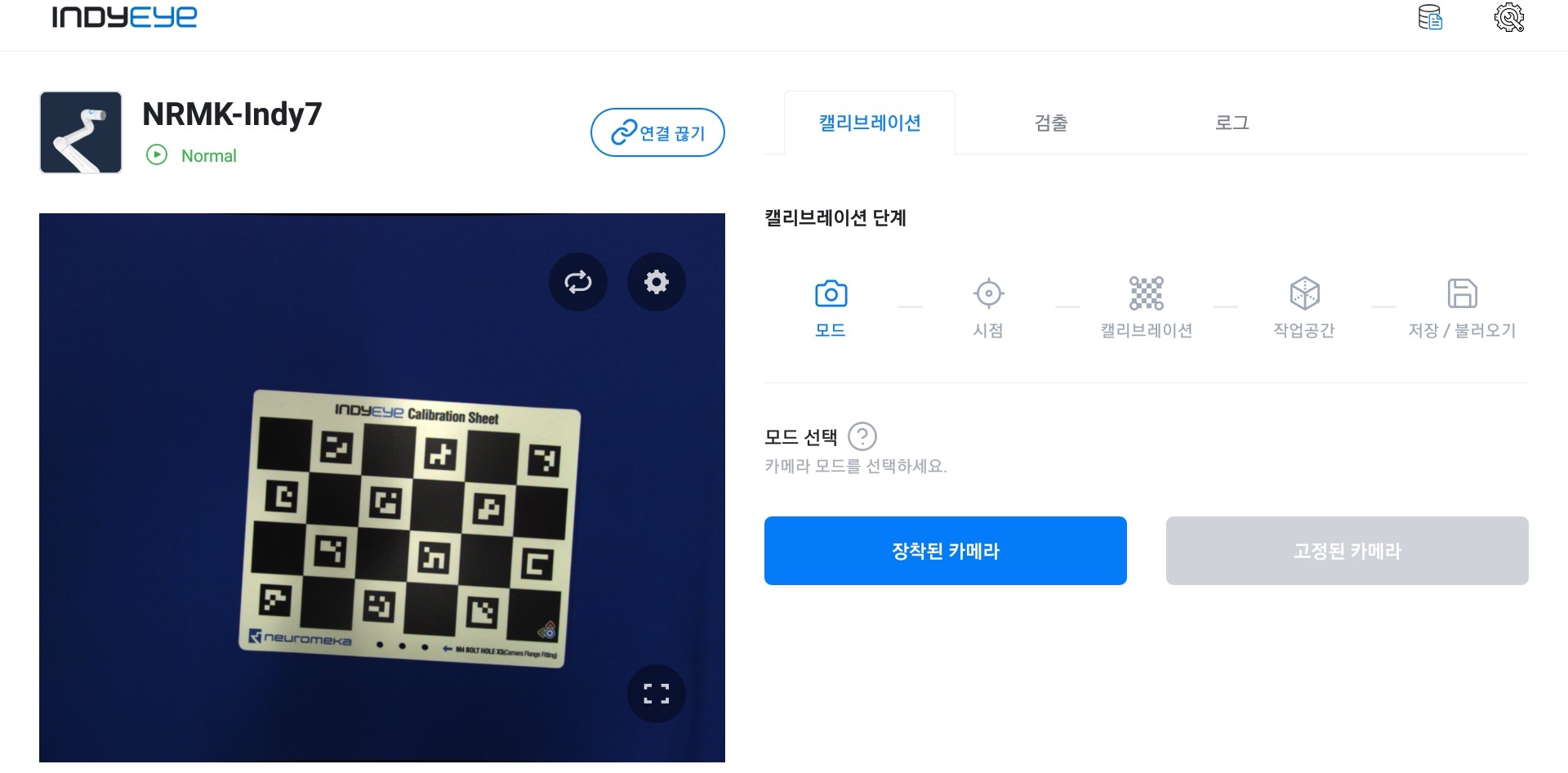
캘리브레이션 탭
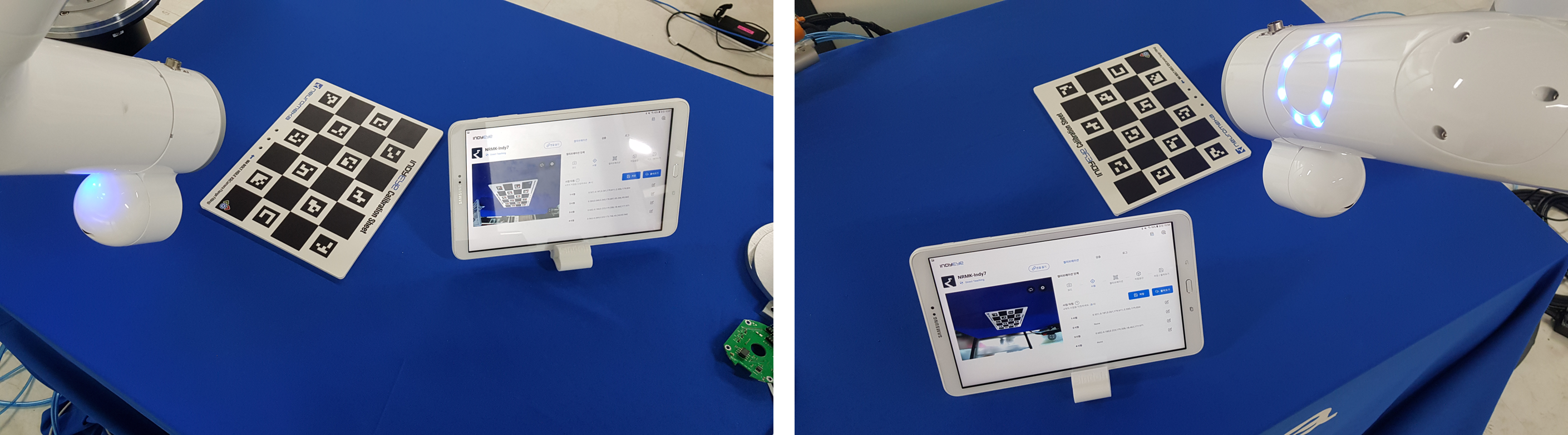
캘리브레이션 단계 중 시점 항목으로 진입하여 캘리브레이션을 수행하는 동안 로봇이 동작할 범위를 지정하기 위한 기반 시점 티칭을 진행합니다. 아래 그림처럼, 로봇을 기반 시점으로 이동한 후, 쓰기 아이콘을 클릭하여 저장합니다. 로봇 이동 시에는 앞서 설명드린 직접 교시 모드나 Conty 를 사용하여 움직이실 수 있습니다. 티칭 후에는 저장과 불러오기를 통해 현재 설정한 시점을 저장하고 이후 캘리브레이션 시 불러올 수 있습니다. 아래의 티칭 방법과 같이, 각 시점에서는 마지막 관절을 적절히 회전하여 캘리브레이션 시트가 앱 화면 상 중앙부에 위치할 수 있도록 조절하십시오.
주의
시점2와 시점4 티칭 시 로봇의 6번 축을 적절히 회전하여 캘리브레이션 시트의 수직 수평을 영상 화면의 축과 일치시키십시오. 또한, 시트가 영상의 1/3 이상을 차지 할 수 있도록 인디아이와 시트 간의 거리를 조정하신 후 캘리브레이션을 진행하시길 바랍니다.
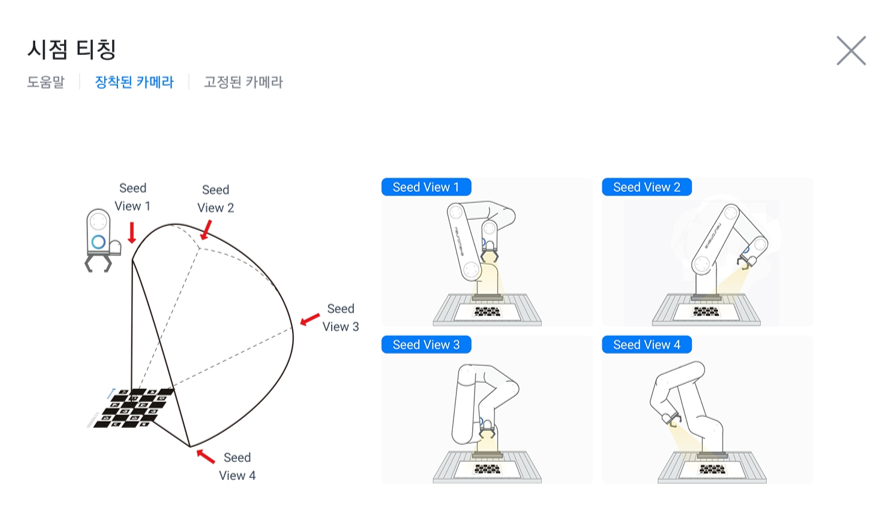
시점 티칭 방법
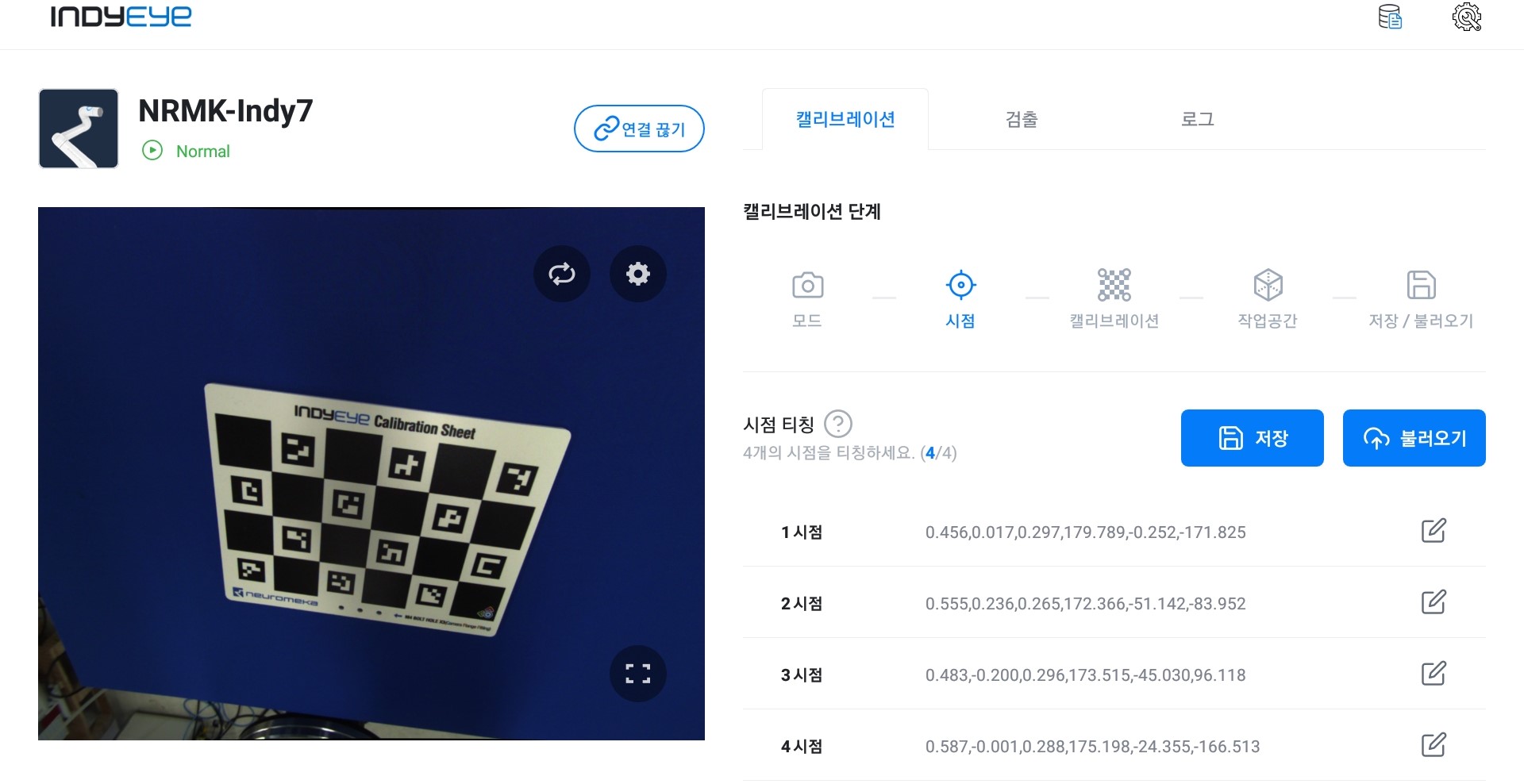
시점 티칭 완료
그 다음, 캘리브레이션 탭에서 캘리브레이션 시작을 클릭하면, 캘리브레이션 정지로 버튼이 바뀌며 로봇이 자동으로 움직이면서 캘리브레이션 시트의 사진을 촬영합니다. 촬영과 캘리브레이션 연산을 번갈아가며 수행하며, 캘리브레이션 연산 중에는 로봇이 정지해있을 수 있습니다. 모든 과정에는 2~5분 내외의 시간이 소요되며, 완료되면 캘리브레이션 완료 라는 메시지가 표출됩니다.
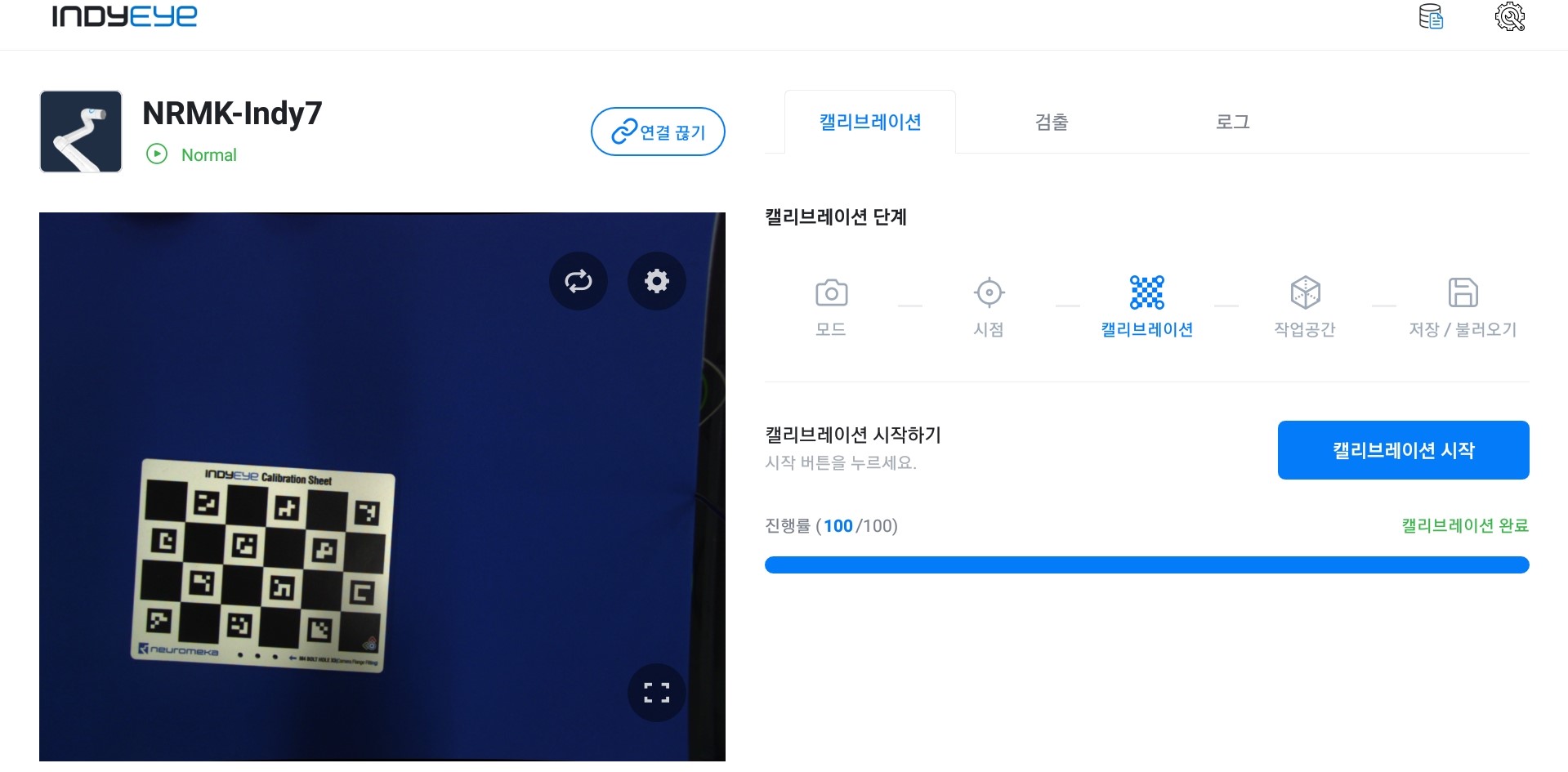
캘리브레이션 완료 화면
이제 작업공간 항목으로 넘어가 검출 버튼을 누르면 화면 상의 캘리브레이션 시트에 좌표계가 표시됩니다. 정상적으로 캘리브레이션이 완료되었다면, 시트에 맞게 좌표계가 표시되며, 화면 하단의 다이얼을 이용하여 미세 조정을 할 수 있습니다. 매우 정밀한 작업에 인디아이를 적용해야 할 경우에는 미세 조정을 통해 작업 공간 설정을 완료하시길 바랍니다.
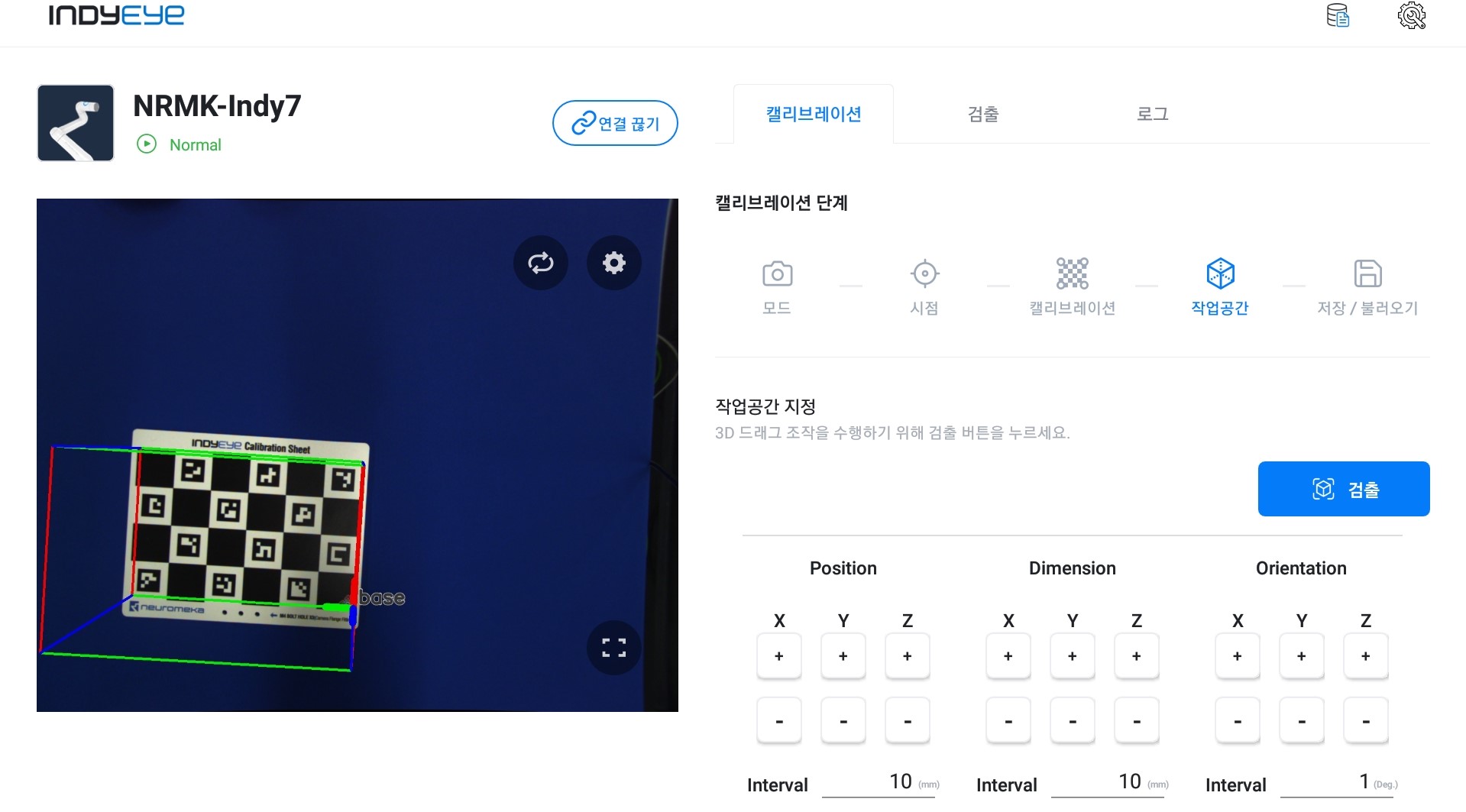
작업공간 설정
모든 캘리브레이션 작업이 완료되면, 현재 설정을 저장하고 Set default 를 클릭하여 기본값으로 설정합니다.
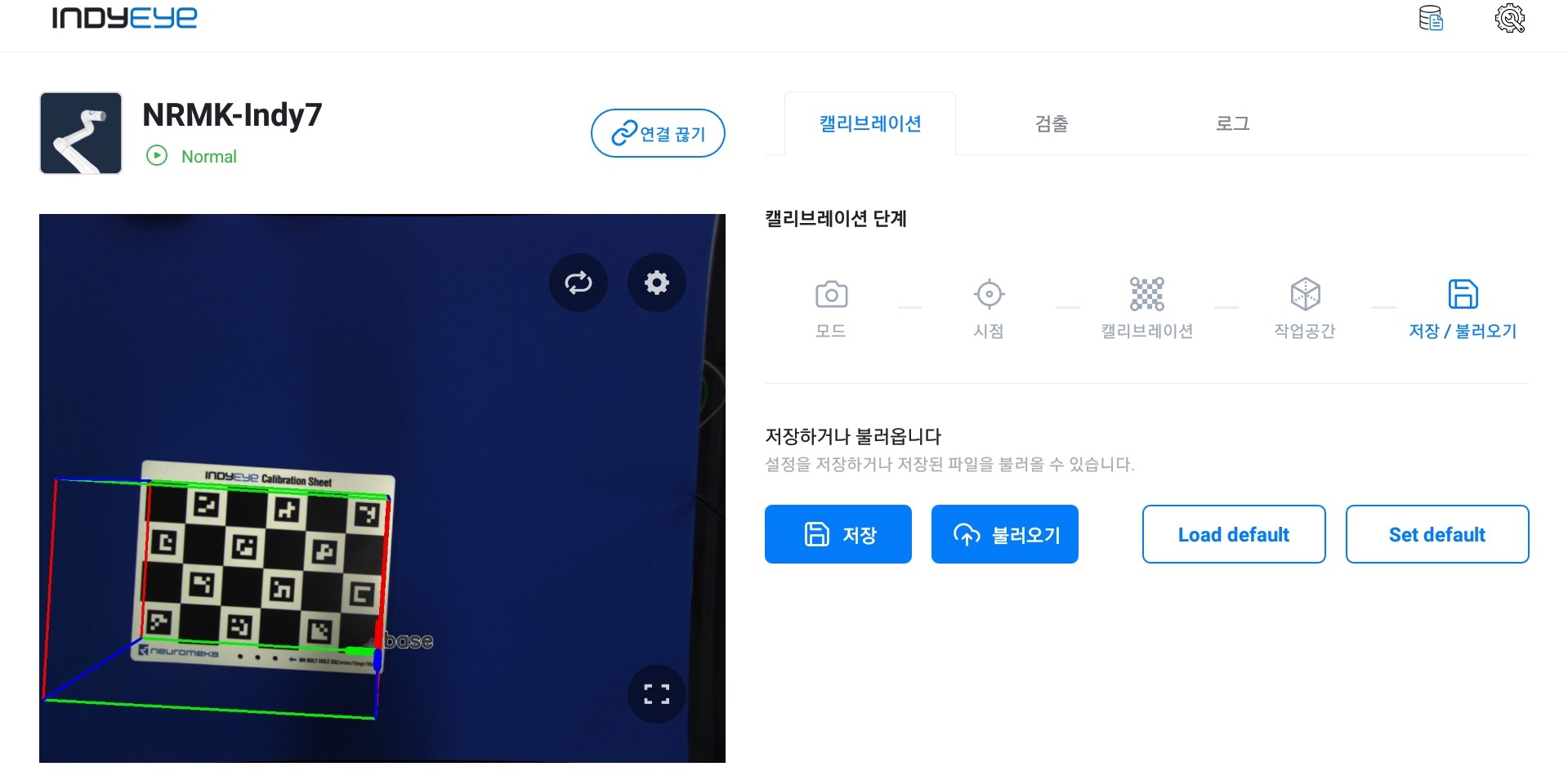
캘리브레이션 결과 저장
그래프 모듈 사용
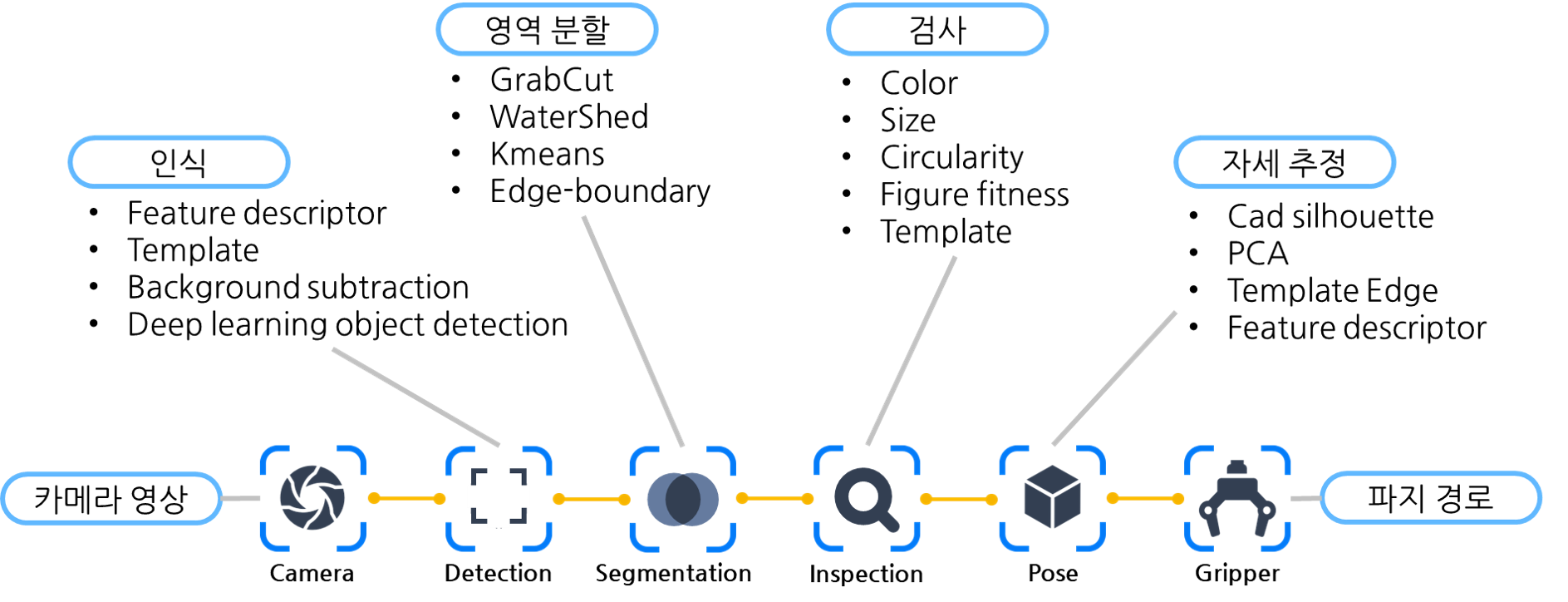
인디아이 그래프 모듈
물체 감지는 검출 탭에서 진행하며, 인디아이 앱의 그래프 모듈을 이용하여 감지 알고리즘을 설정합니다. 기본 구조는 위의 그림과 같이, 카메라 영상, 인식, 영역 분할, 검사, 자세 추정, 파지 경로 등으로 구성되며 각 모듈을 적절히 추가하고 수정함으로써 감지 알고리즘을 편집할 수 있습니다. 검출 탭에서 그래프 수정을 클릭하면 사용가능 한 모든 모듈을 확인할 수 있습니다. 각 그래프 모듈에 대한 세부 설명은 그래프 모듈 리스트와 인디아이 앱 상의 모듈별 도움말 아이콘을 클릭하여 확인할 수 있습니다. 본 장에서는 간단한 감지 예제를 통해 그래프 모듈의 기본적인 사용법에 대해 소개합니다.

카메라 모듈 추가
먼저 그래프 모듈 중 가장 기본이 되는 모듈로, 카메라 영상을 인식하는 Sensor 클래스의 Camera 모듈을 선택하여 추가합니다. 그 다음, 인식을 담당 하는 Detection 클래스의 DetectMarker 를 추가합니다. 이 때, 드래그 앤 드롭으로 추가를 해도 되지만, 해당 모듈 클릭 시 아래와 같은 모듈 타입 선택 창이 나타납니다.
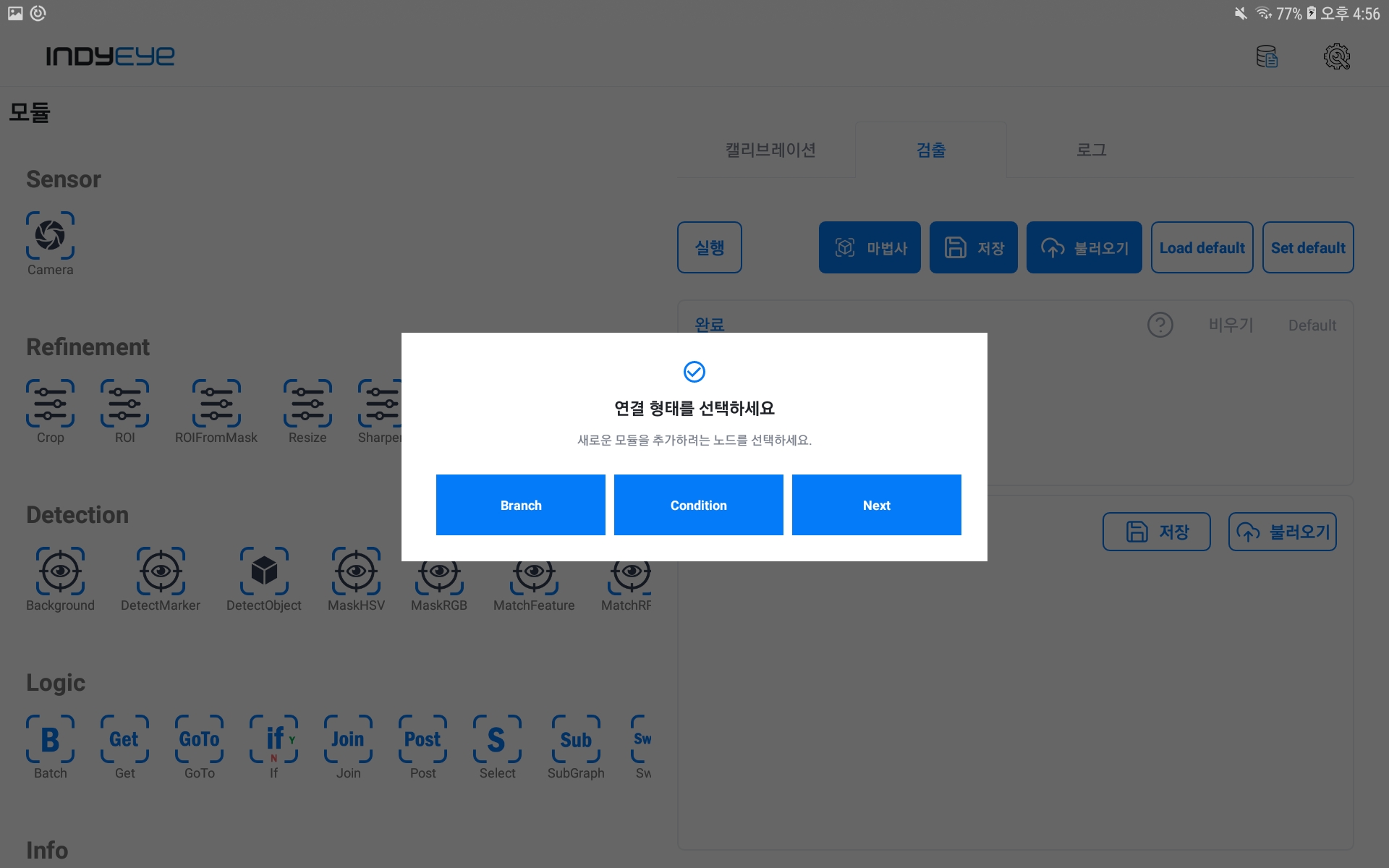
모듈 연결 형태 설정
Next 는 현재 그래프의 바로 옆에 모듈을 추가하는 것이고, Branch 는 현재 그래프의 하단에 모듈을 추가하여 주로 Switch 항목에 사용됩니다. Condition 은 현재 그래프 모듈의 상단에 추가하여 해당 모듈이 실행되는 조건을 설정합니다. 이번에는 3가지 타입 중 Next 를 선택하여 아래와 같이 Camera 모듈에 연결합니다. 그리고 DetectMarker 세부 TYPE 설정에서 sheet 를 선택합니다.
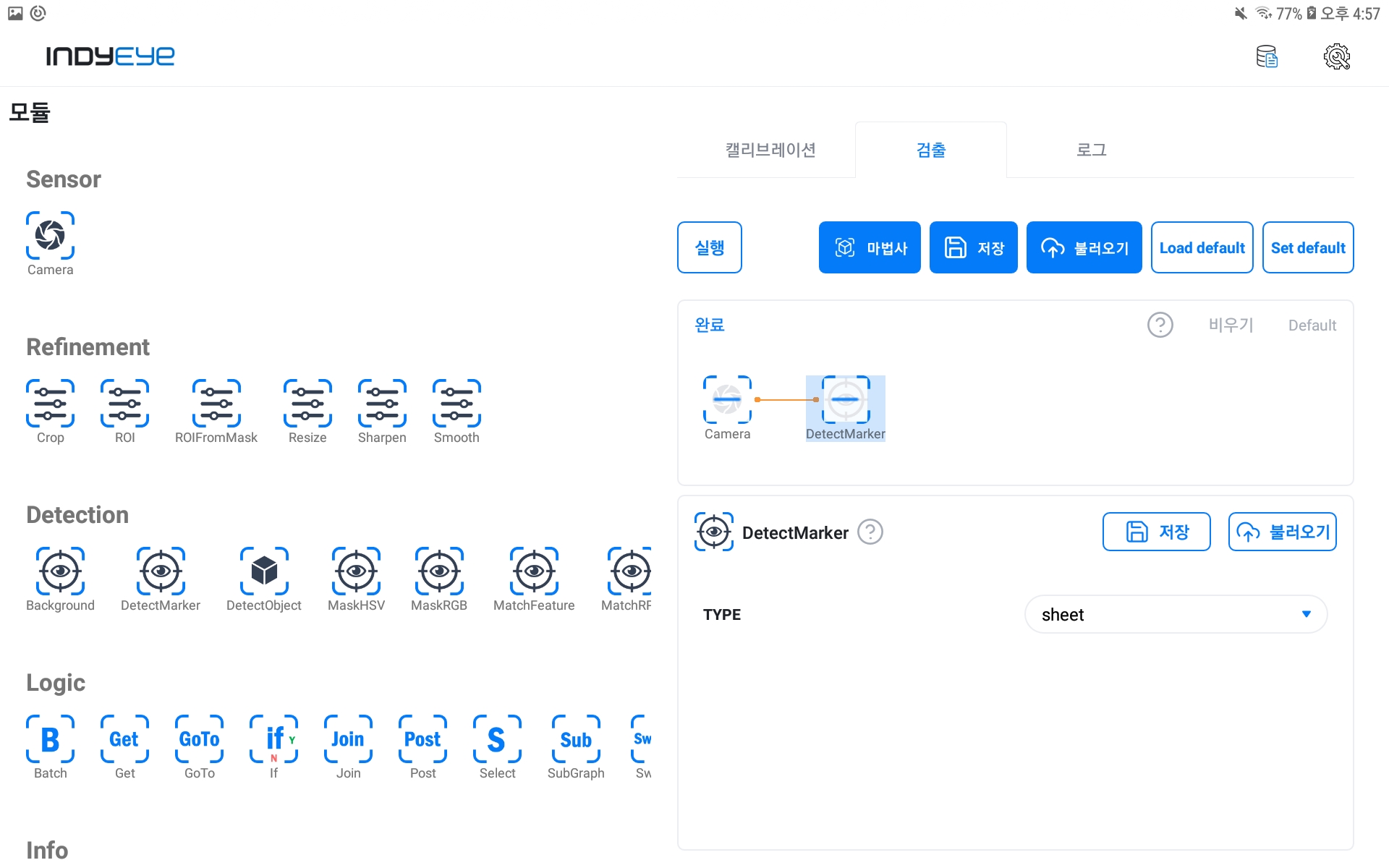
DetectMarker 모듈 세부 설정
이제 Detection 클래스의 모듈 이후 반드시 추가되어야 하는 Logic 클래스의 Select 모듈을 그래프에 추가합니다. 인식된 물체를 선택하는 모듈로써, 상세 설정의 KEY 는 선택 기준이 되는 값이며, METHOD 는 선택 방법입니다. 본 예제에서는 KEY 는 score 로, METHOD 는 biggest 로 하여 인식 점수가 가장 높은 물체를 선택하도록 합니다. 아래 그림처럼 그래프 구성을 완료하였으면 저장을 클릭하여 모든 설정을 한 번에 저장합니다.
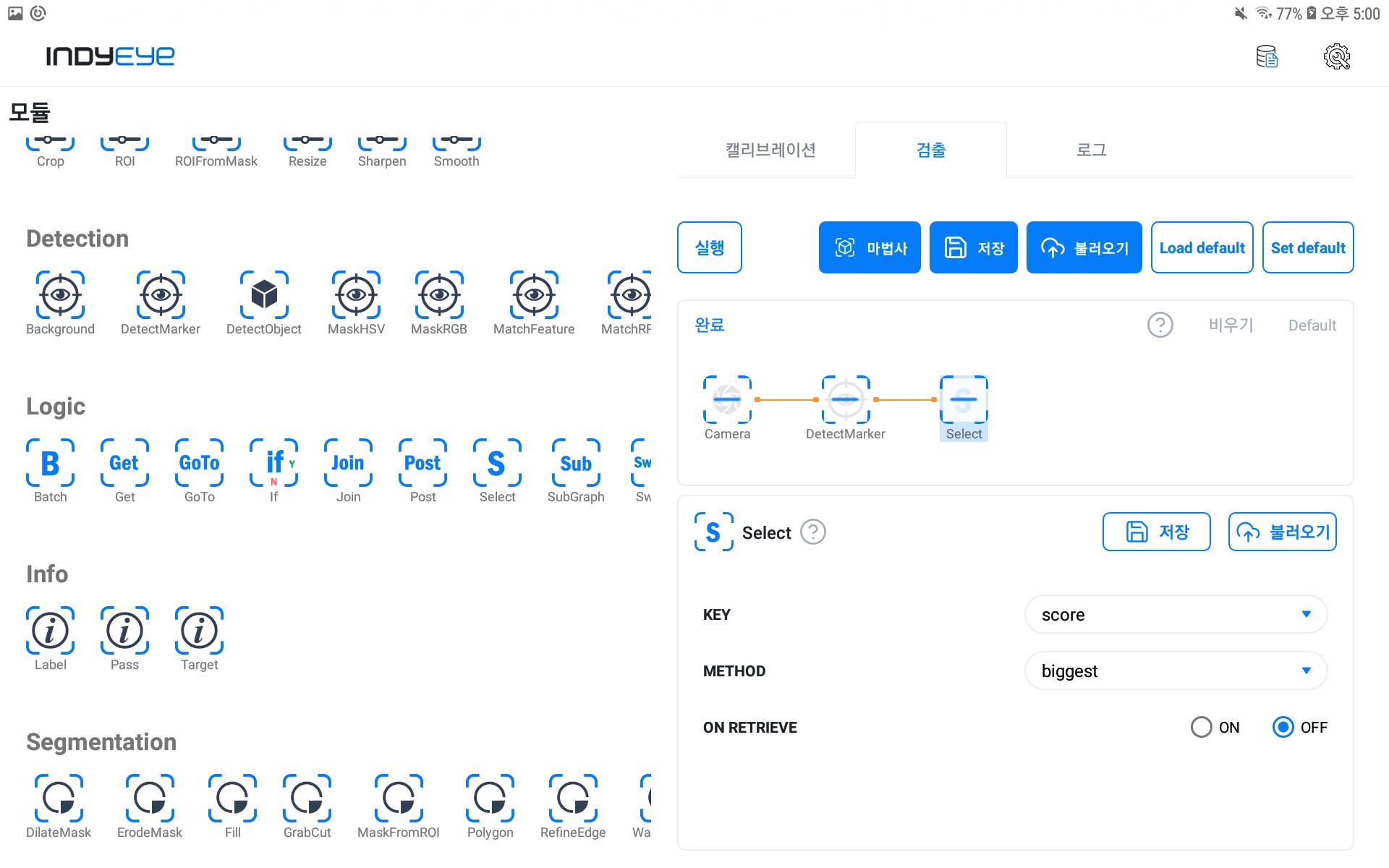
Select 모듈 세부 설정
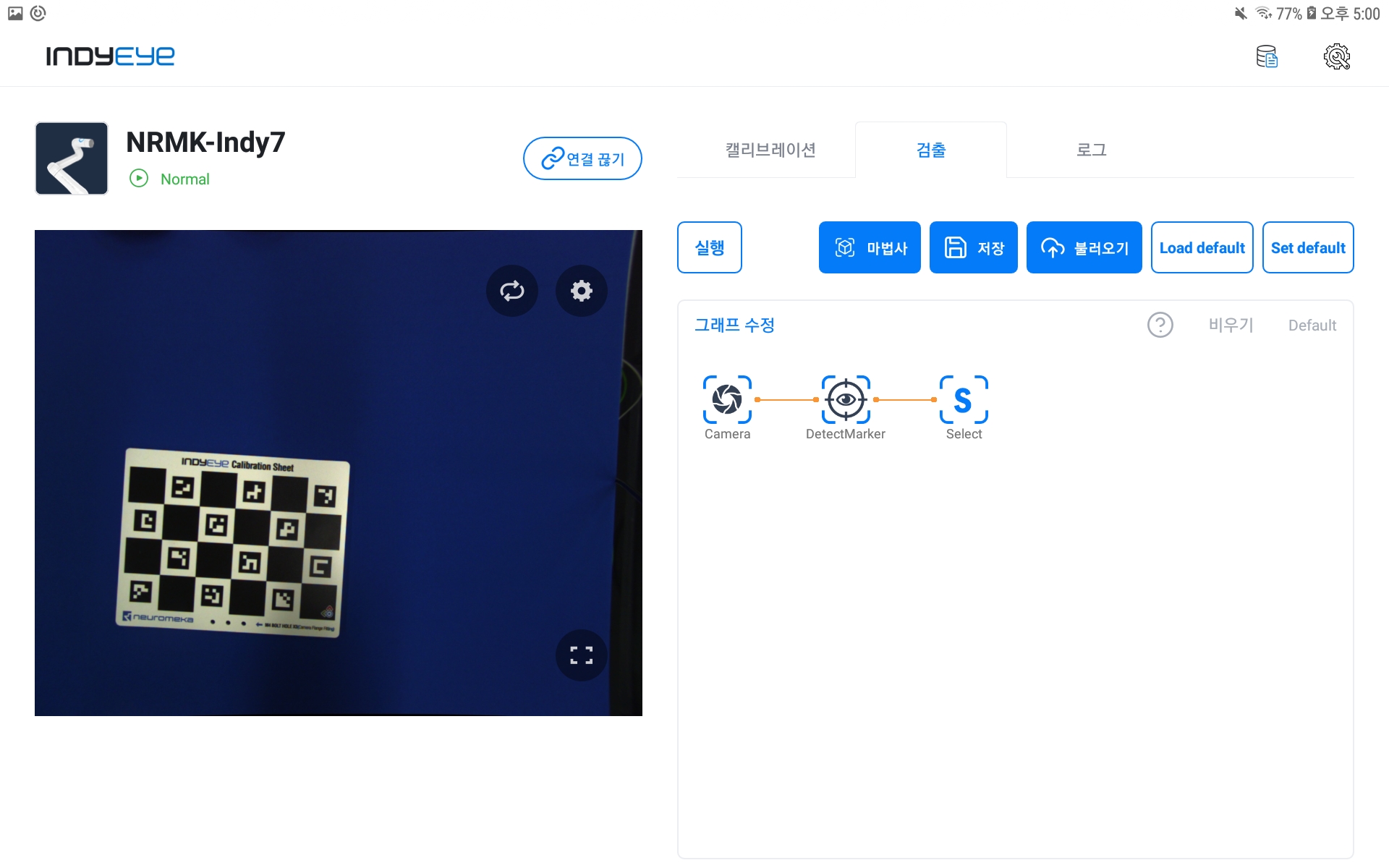
그래프 완성
위 화면에서 실행 버튼을 클릭하면 완성된 알고리즘을 실행하며 실행 결과 화면은 아래와 같습니다.
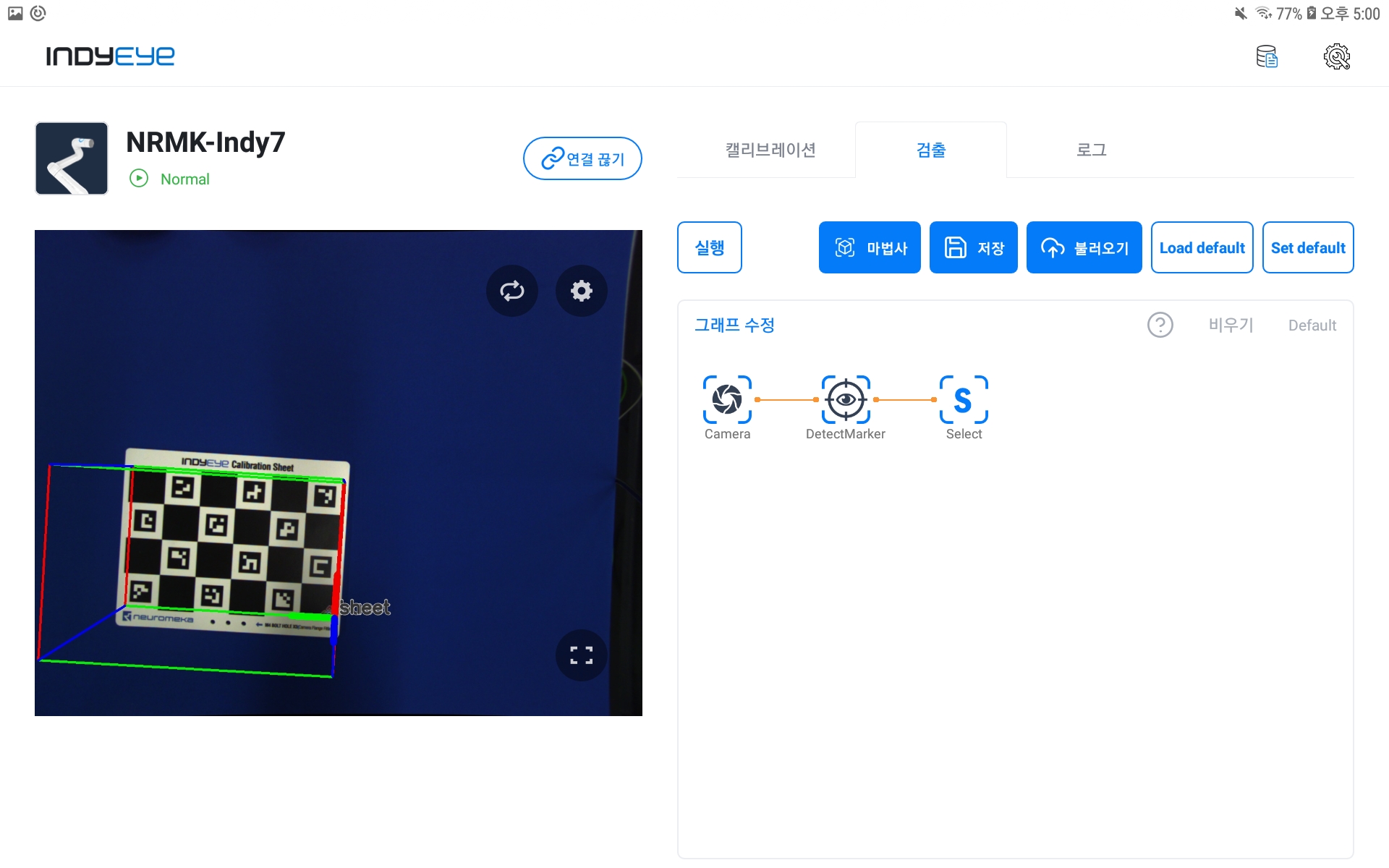
시트 인식 결과
이로써 인디아이 설치와 캘리브레이션 및 인디아이를 활용한 간단한 마커 인식 예제까지 완료하였습니다. 다음 장에서는 인디 아이의 대표적인 어플리케이션인 물체 검사와 픽 앤 플레이스 작업의 튜토리얼에 대해 상세히 설명합니다.
