MoveIt GUI 환경 Path Planning
요구 환경
-
Ubuntu 16.04 및 ROS Kinetic 이상 이 설치된 PC
-
indy-ros 및 indy-ros-examples 소스코드 설치
위 요구 환경의 설치가 완료되지 않은 경우 설치를 먼저 진행하여 주십시오.
실행 방법
1. 터미널 열기
2. ROS 환경설정 확인하기
3. 명령어 실행하기
- 데모(가상 로봇)의 경우
1 | |
- 실제 로봇을 움직이는 경우
1 | |
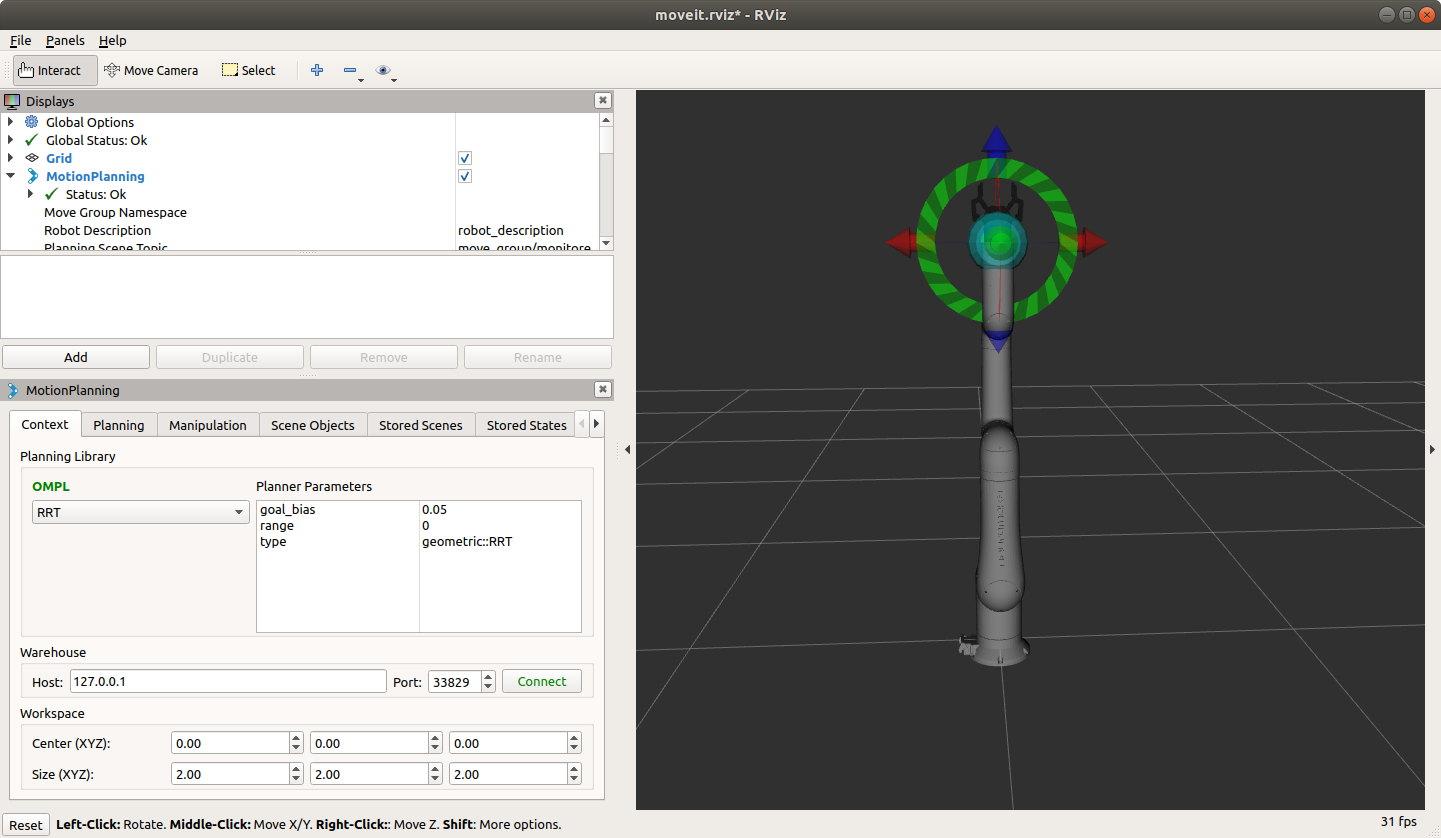
위 명령어를 터미널에서 실행한 후 잠시 기다리면 아래의 창이 실행됩니다. 로봇의 끝단에 그려지는 파란색 구 와 축을 이용하여 path planning 목표를 설정할 수 있습니다.
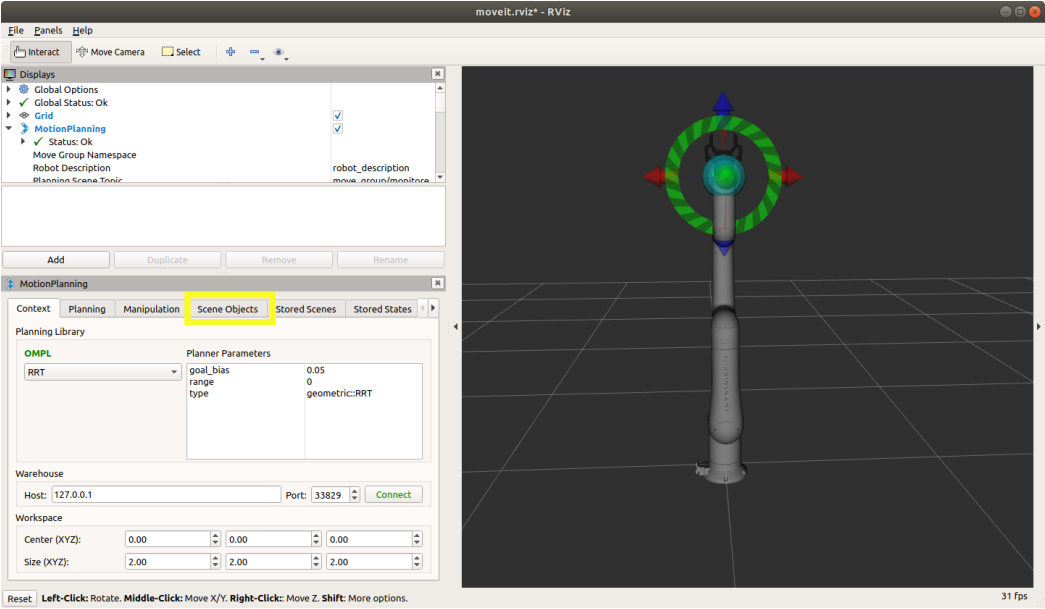
4. CAD 모델 불러오기
RViz 에 CAD 모델을 불러와 실제 로봇의 환경과 유사한 장애물을 설치할 수 있습니다.
먼저 scene object 탭을 클릭합니다.
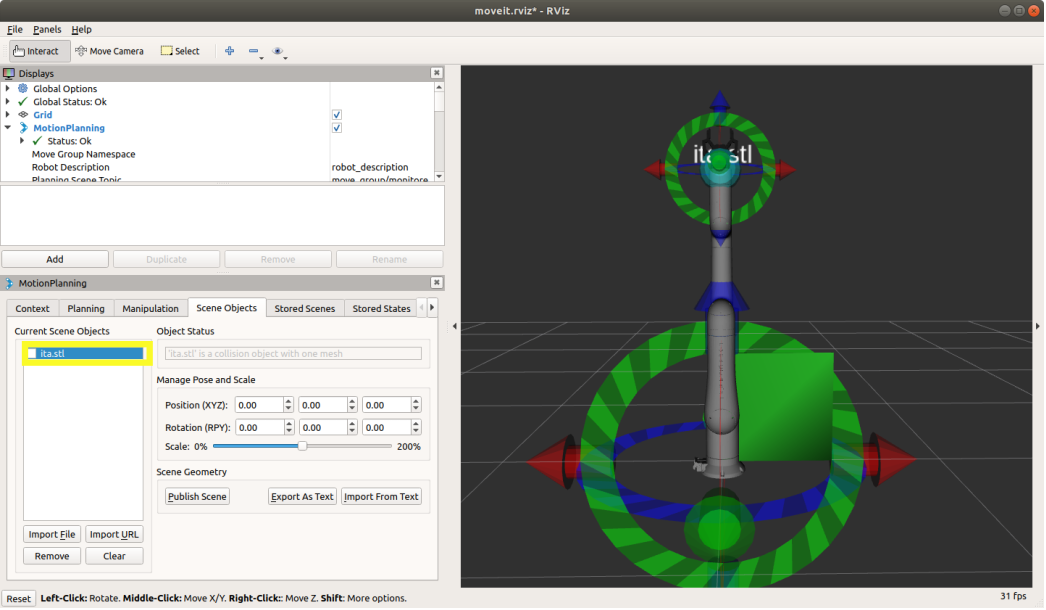
import file 버튼을 클릭합니다.

파일 브라우저에서 설치하고자 하는 CAD파일을 선택하여 'open'을 클릭합니다. 본 예제에서는 indy-ros-examples/indy_robotiq_moveit_config/misc/ita.stl 을 사용합니다. 모델을 불러오는데 성공하면, 아래와 같이 rviz화면에 모델이 표시됩니다.
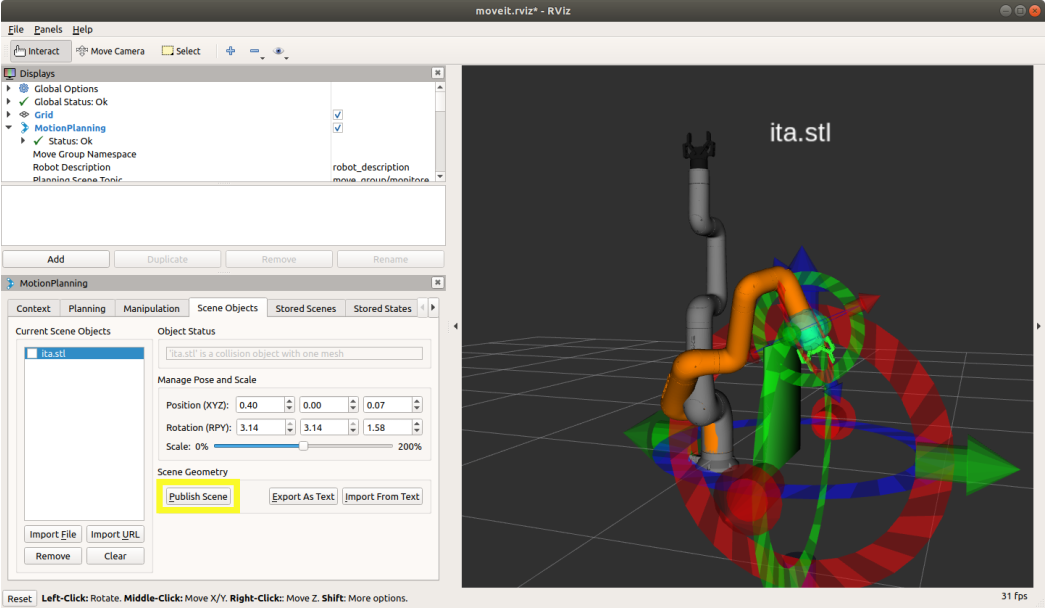
5. CAD 모델 위치시키기
로봇과 마찬가지로 CAD 모델 또한 마우스로 드래그 하여 위치를 변경할 수 있습니다.
모델의 이동이 완료된 후, publish scene 버튼을 클릭합니다.
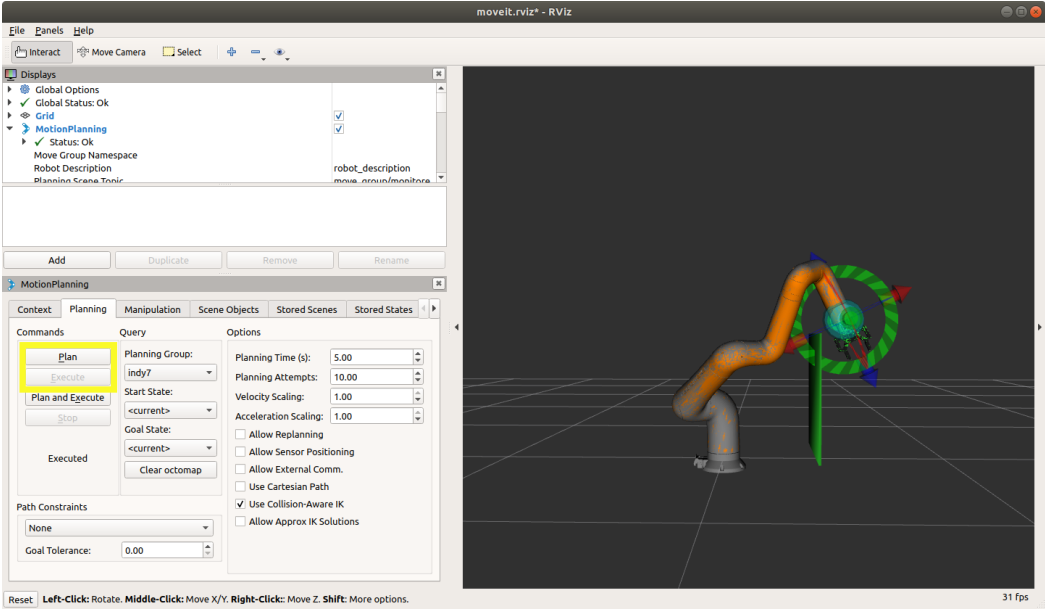
6. 플랜, 실행 하기
planning 탭으로 돌아와서 plan 버튼을 클릭합니다.
회색로봇이 현재 로봇의 위치이며, 오랜지색의 로봇이 목표 로봇 위치입니다.
plan 에 성공할 경우 회색로봇에서 오랜지 색의 로봇으로 장애물을 회피하는 이동경로가
애니메이션으로 표시 되는것을 확인할 수 있습니다.
이 상태에서 execute 버튼을 클릭하면 회색 로봇이 경로를 따라 움직이는 것을 확인 할 수 있습니다.
Note
로봇의 초기 속도는 안전을 위해 매우 느리게 설정되어있습니다. 먼 거리를 이동하여 MoveIt의 실행 시간 제한을 넘기면 로봇이 정지합니다. 먼 거리를 이동할 경우 로봇의 속도를 높게 설정해 주시기 바랍니다. 로봇의 속도는 dcp 드라이버에서 설정할 수 있습니다.
Warning
안전을 위하여 움직이기 전에 비상정지 버튼을 준비해 주십시오.
