시작하기
개요
IndySDK 는 Indy 제어프레임워크(IndyFramework)의 확장성과 유연성을 높이기 위해 설계된 연구용 개발환경 입니다.
-
IndyFramework 는 뉴로메카 Indy을 구동시키는 핵심 소프트웨어 프레임워크입니다.
-
IndySDK 는 IndyFramework 2.0을 기반으로 개발된 확장 프레임워크이며, 비영리 연구기관에게 연구 목적으로 제공됩니다.
IndySDK는 개발자에게 다음과 같은 이점을 제공합니다.
-
호환성: 뉴로메카의 IndyFramework가 제공하는 다양한 기능들을 API와 SDK를 통해 쉽게 접근할 수 있으며, 통신프로토콜과 티칭팬던트 연동 기능을 그대로 활용할 수 있습니다.
-
재사용성: IndySDK의 컴포넌트 방식 소프트웨어 아키텍처는 재사용성을 보장합니다.
-
간편성: 컴포넌트의 프로젝트 템플릿이 Eclipe 개발환경에서 플러그인으로 제공됩니다.
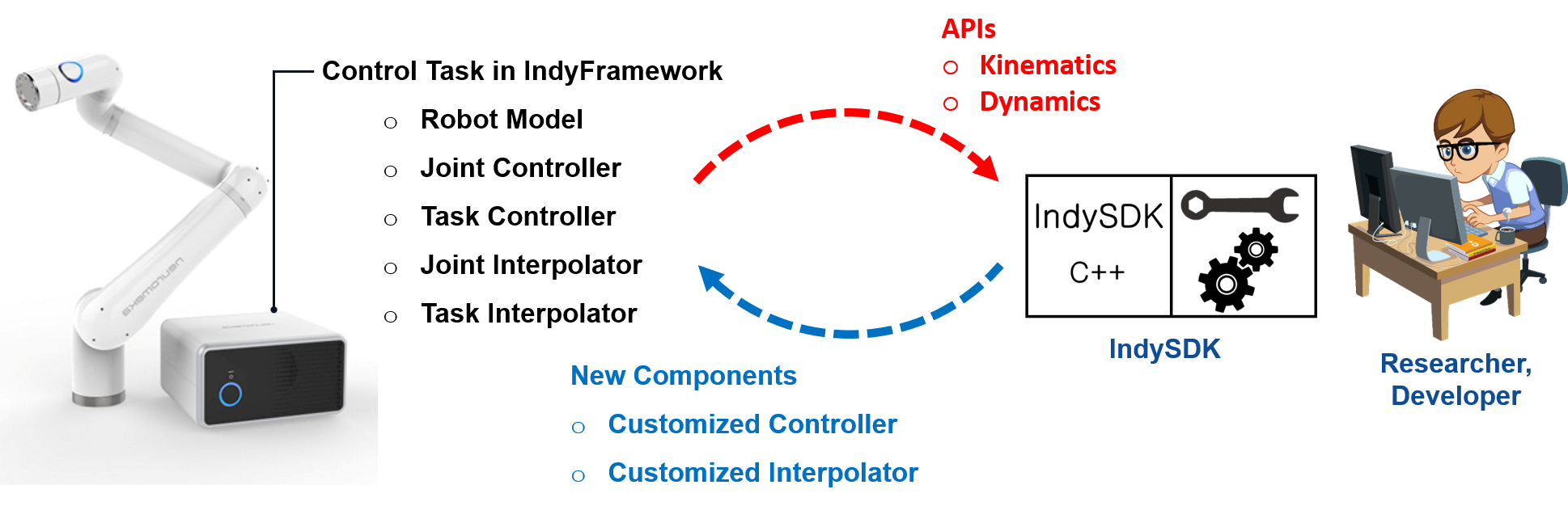
IndyFramework은 기본적으로 로봇의 기구학적 동역학적 모델, 관절공간 제어기, 작업공간 제어기, 관절공간 궤적 인터폴레이터 및 작업공간 궤적 인터폴레이터 다섯 유형의 컴포넌트로 구성되어 있습니다. 개발자는 IndySDK를 이용하여 로봇제어의 핵심 컴포넌트인 관절공간 제어기, 작업공간 제어기, 관절공간 궤적 인터폴레이터 및 작업공간 궤적 인터폴레이터 을 직접 개발할 수 있습니다. 즉, IndySDK를 이용해서 개발자가 직접 개발한 위치제어, 힘제어, 임피던스 제어 알고리즘 등을 IndyFramework에 쉽게 이식할 수 있습니다.
설치하기
IndySDK를 설치하기 위해서 뉴로메카의 다운로드 페이지에서 다음의 뉴로메카 소프트웨어를 다운받아서 설치하십시오.
- IndyFramework, Windows, v3.0.9 및 PlatformSDK, Windows, v3.0.5
설치를 완료한 후 다음의 IndySDK 패치 파일 다운로드하여 설치하십시오.
- IndySDK Patch, Windows, v2.3.0.1
공급/판매 정책
IndySDK는 비영리 연구기관(연구소 및 대학교)에만 제공됩니다. 또한 IndySDK는 뉴로메카와 사용관련 협약을 통해 사용자 라이센스를 발급 받은 후 사용 가능합니다. 구체적인 문의사항은 뉴로메카 영업팀(sales@neuromeka.com)에 문의해주십시오.
설치가 성공적으로 진행 되었다면 설치 지정 디렉토리에 NRMKFoundation 및 NRMKPlatformPC2 (STEP3사용자의 경우 NRMKPlatformPC3) 폴더들의 생성과 함께 NRMKFoundation 폴더 내부에서 LeanDeployment 폴더를 확인할 수 있습니다.
NRMKFoundation 은 IndySDK를 사용하여 컴포넌트 개발을 수행 할 수 있도록 다양한 헤더와 라이브러리 파일들이 설치됩니다. 폴더의 하위폴더들은 다음과 같습니다.
- bin 은 개발 및 테스트 단계에서 사용자가 활용할 수 있는 유틸리티 도구들을 포함합니다.
- core 는 프레임워크 개발을 위한 핵심 헤더파일과 3rd party 라이브러리를 포함합니다.
- helper 는 프레임워크 개발을 위한 유틸리티 헤더파일을 포함합니다.
- example 은 IndyFramework에서 구현된 실시간 태스크 예제 프로젝트를 포함합니다.
- lib & lib64 는 프레임워크 개발을 위한 핵심 라이브러리 파일들을 포함합니다.
NRMKPlatform 은 Eclipse 개발환경을 포함하며 Xenomai, EtherCAT, 직렬 통신 인터페이스등을 STEP에서 활용하기 위한 라이브러리 파일들을 포함합니다.
- bin 은 Eclipse IDE를 포함하며 필수 라이브러리 파일들을 포함합니다.
- example 은 STEP의 이더켓 통신, 실시간 태스크, 그 외 입출력 예제들을 예제들을 포함합니다.
- Drivers 는 JRE와 VC++ 설치파일들을 포함합니다.
보안정책
IndySDK 를 이용하여 개발한 컴포넌트를 IndyFramework 에서 사용하기 위해서는 뉴로메카에서 발급한 라이센스 정보 (사용자 이름, 이메일, IndySDK 시리얼번호) 를 기입하여야 합니다. 라이센스는 로봇 제어기당 한 개만 발급이 가능하며 개발용 PC는 (IndySDK만 설치되어 있다면) 사용 제한이 없습니다. 구체적인 라이센스 정보 기입방법은 튜토리얼 섹션을 참고하십시오.
IndySDK 매뉴얼의 구성
이 문서는 IndySDK 기초 사용방법부터 IndySDK를 활용한 다양한 로봇제어 예제에 이르기까지 광범위한 내용을 다루기 때문에 사용자는 IndySDK의 활용방법을 쉽게 터득할 수 있습니다. 매뉴얼의 구성은 다음과 같습니다.
