Troubleshooting
1. My component is not executed
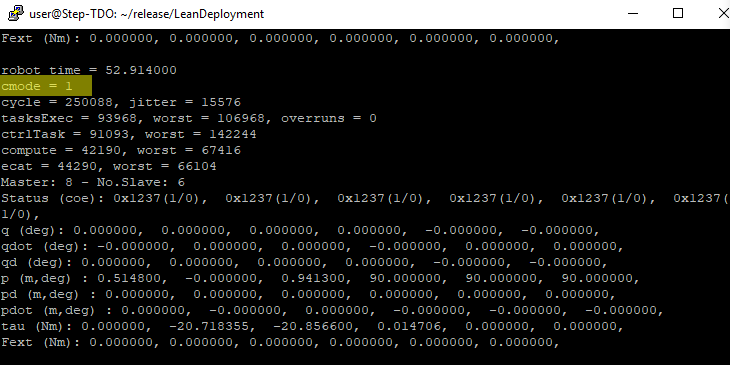
As shown in the following figure, cmode indicates the current control status of the robot.
Also, as shown in the following table, only the relevant component is activated according to the control state. This means that the developed component only works in a specific cmode.
control mode (cmode) |
Joint Trajectory Interpolation Component | Joint Control Component | Task Trajectory Interpolation Component | Task Control Component |
|---|---|---|---|---|
| Ready (0) |
- | computeControlTorq | - | - |
| Joint Move (1) |
traj | computeControlTorq | - | - |
| Task Move (2) |
- | - | traj | computeControlTorq |
| Direct Teaching (3) |
- | computeGravityTorq | - | - |
Component function called at each cmode
