Document Index
Table of Contents
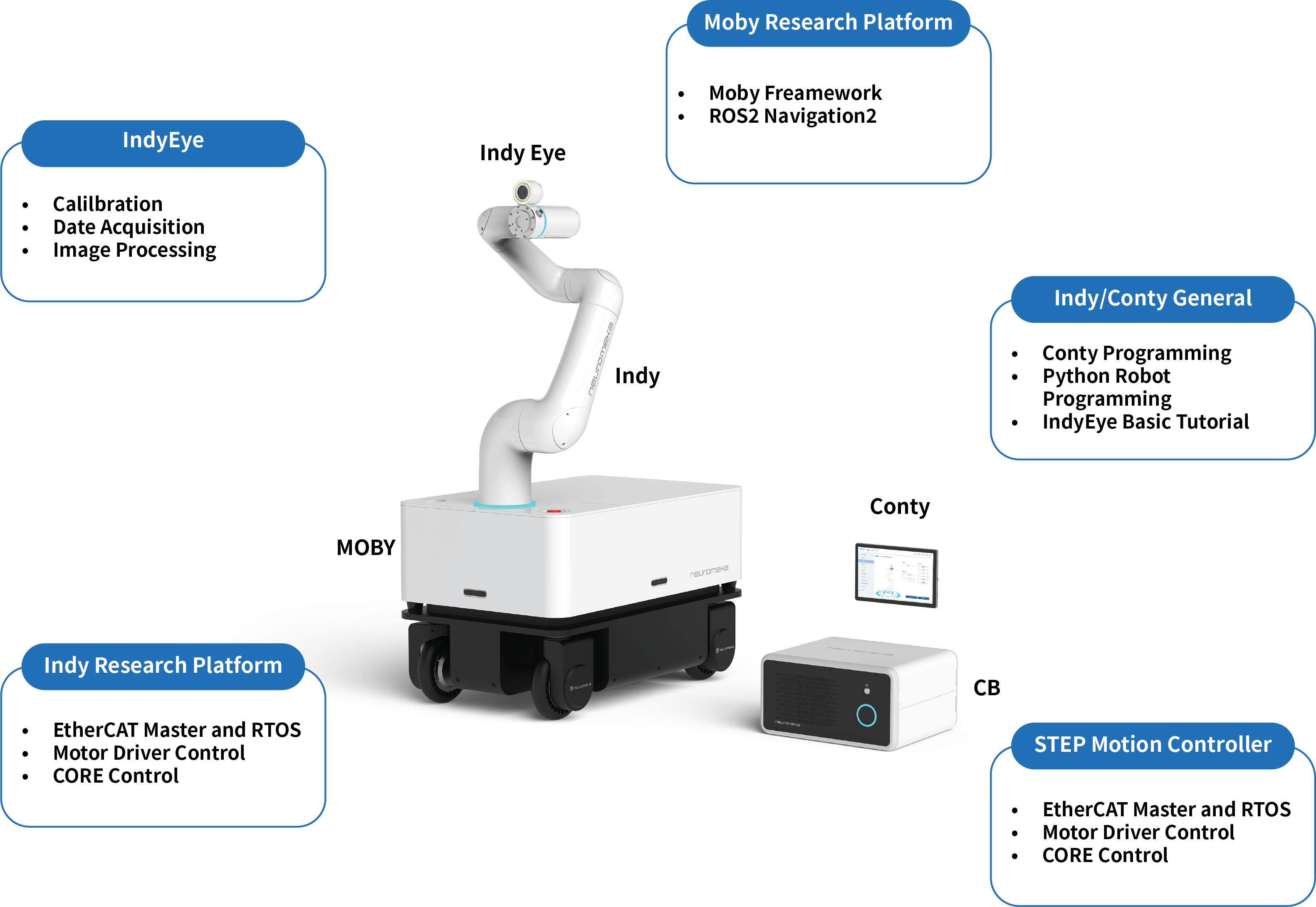
Neuromeka Collaborative Robot Indy
Neuromeka's collaborative robot Indy operates through its own Linux-based embedded controller, STEP, developed by Neuromeka. The core software controlling Indy, Indy Framework, is equipped with essential robotics functions such as the kinematics, dynamics, control algorithms, and collision detection algorithms of collaborative robots.
- Indy Framework facilitates easy robot programming for non-experts through Conty, considering usability.
- Indy API provides various high-level interfaces, allowing advanced users to integrate and control various equipment with Neuromeka robots.
- Indy SDK offers a development environment that allows control of low-level torque/current outputs of the robot.
- Users can transmit and receive signals between the robot and external sensors through various input/output interfaces, enabling them to perform various system integration programming.
Note
This online manual is for the Indy Framework v3.4.0 (Conty v3.4.0) version. You can find manuals for previous versions by clicking the  button at the top right.
button at the top right.
Indy API
Users can implement high-level programming interfaces using the Indy API. Three APIs are provided: IndyDCP3 based on gRPC, Modbus TCP widely used in industry, and IndyDCP2 based on TCP/IP. Additionally, example codes written in various languages and explanations on how to use them are provided.
Indy SDK
IndySDK is a research platform environment that allows users to input torque calculated directly into all joints of the robot. Users can replace the built-in low-level controller (nonlinear \mathcal{H}_\infty optimal control) with another controller. It also enables the design and easy implementation of impedance/admittance controllers using external sensors like force/torque sensors. Utilizing IndySDK allows full use of the powerful features of Indy Framework (Conty, Indy API) while enabling researchers to transplant their own developed robot controllers into Indy, making it extremely useful for controller prototyping. This section explains how to utilize IndySDK based on various control examples.
ROS
ROS (Robot Operating System) is an open-source software platform that provides various robotics libraries and development environments. This section explains the installation methods and integration methods with Indy for widely used manipulator research ROS packages such as MoveIt!, RViz, and Gazebo.
ROS2
ROS2 (Robot Operating System 2) is a robotic operating platform that enhances modularity, scalability, and interoperability based on the original ROS.
Neuromeka Robot Vision IndyEye
IndyEye is a vision solution mounted on Neuromeka's collaborative robots. It offers object detection and classification (inspection) functions based on deep learning and facilitates the easy application of deep learning algorithms to on-site workpieces through automated workpiece data collection and remote learning services. This section explains the basic usage of IndyEye, from workpiece data collection to algorithm training and object detection. It also provides communication protocol examples and pick-and-place implementation examples.
Neuromeka Autonomous Mobile Robot Moby
Moby Framework is Neuromeka's mobile manipulator control software framework running on its own Linux-based embedded controller, STEP3. It allows synchronized control of the mobile robot's wheel drive and the collaborative robot's joint drive from a single controller, enabling whole-body control functionality.
Neuromeka Collaborative Robot NURI Series
Collaborative Robot NURI Series is a robotic platform ecosystem configured to use multiple manufacturers and different types of robots in a unified manner using Neuromeca's controllers and teaching pendant. Conty makes it easy for anyone to program a robot, considering the ease of use of non-professionals.
- NURI SDK provides a protocol for drive control of the NURI robot.
Neuromeka Real-Time EtherCAT Master STEP
STEP is an embedded robot controller, and provides PlatformSDK that is software framework for development of realtime control applications on Linux/Xenomai environment which is the hard realtime OS. Development environment running on MS Windows® is also provided in order for engineers unfamiliar with Linux environment to develop embedded control applications.
STEP is integrated with EtherLab, which has been proven open-source EtherCAT master stack for many systems, for multi-axes synchronized high-speed realtime distributed control. Development of standard EtherCAT based realtime cotrol applications is supported by CoE (CANopen-over-EtherCAT) protocol based programming interface. Legacy devices with RS485 or CAN interfaces can be connected for standard ports. STEP also provides automatic generation of basic CoE based application codes with various software tools. In order to facilitate CAN based applications NRMKPlatform SDK has RT CAN and CanFestival (open-source CANOpen framework software) installed.
To facilitate the use of STEP, Neuromeka provides a GUI tool that automatically configures the PDO, SDO mapping and system interface of multiple Ethernet slaves. This powerful function make it easy to apply research requiring hard realtime control for multi-axis actuators. This chapter describes basic tutorial of PlatformSDK which is software framework for STEP. Constructing EtherCAT system interface and automatic code generation are covered in EtherCAT chapter, which provides step-by-step example.
EtherCAT
This chapter describes how to use Neuromeka's ECatService which is GUI tool that automatically constructs EtherCAT system interface. Using the ECatService, users can easily connect several EtherCAT slaves (actuators and/or sensors) to STEP, and perform PDO and SDO mapping. Users can develop application softwares that use EtherCAT communication and Xenomai realtime process through automatic code generation of ECatService. This chapter provides step-by-step explanation to construct EtherCAT system interface for Smart Actuator (CORE) developed by Neuromeka, as well as examples for third-part EtherCAT slave devices (Maxon motor, Beckhoff)
Neuromeka Smart Actuator CORE
CORE is smart actuator module for robot and automation system. There are 3 types of CORE modules: CORE100, CORE200 and CORE500, which are 100W, 200W and 500W modules respectively. Each CORE module is combination of harmonic drive , BLDC motor, brake, multi-turn absolute encoder 16-bit and motor driver. CORE use EtherCAT communication interface with CiA402 motion profile compliance.
