튜토리얼 1: 힘/토크 센서
CANbus 노드 및 연결
본 튜토리얼에서는 ROBOTOUS 힘/토크 센서로 CANbus 통신 시스템 인터페이스를 구축하는 내용을 다룹니다. 전체 시스템 연결도와 인터페이스를 구성할 CANbus 장치인 힘/토크 센서와 추가 장치 대한 정보는 아래 표와 같습니다.

| 종류 | 설명 | 수량 |
|---|---|---|
| ROBOTOUS RFT80-6A01 | 6축 힘/힘/토크 센서∅80×22mm, 210g | 1 |
| W1502 케이블 | - | 1 |
| RS485/CAN 커넥터 | - | 1 |
CANbus 시스템 구성 요소
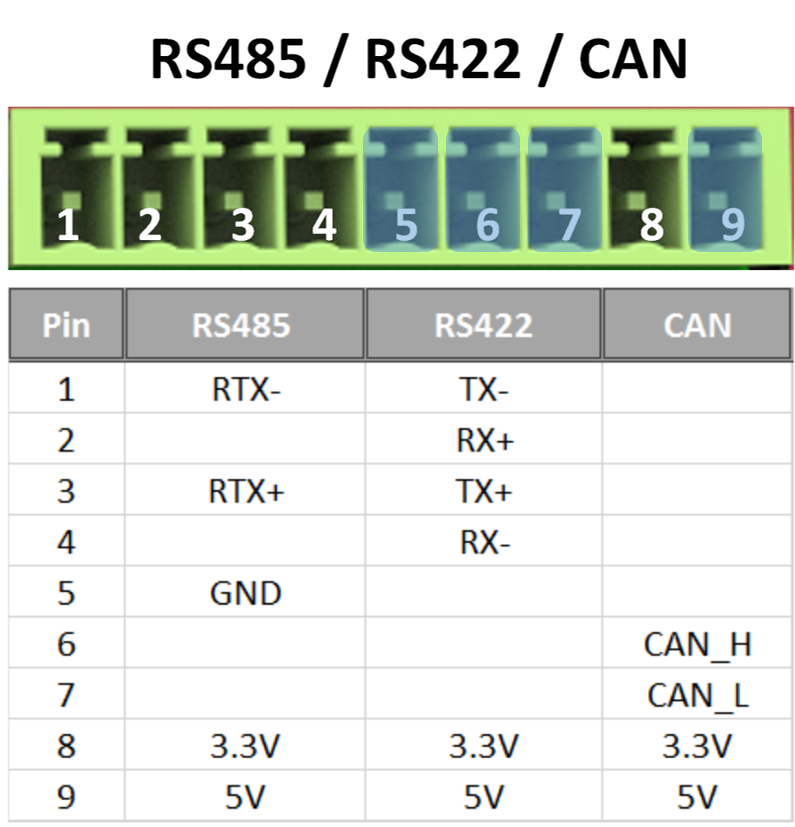
먼저 힘/토크 센서의 입출력 PIN 중에서 CANbus 통신에 필요한 CAN HIGH, CAN LOW, GND, 5V PIN 만을 사용할 것이기 때문에 이를 분류할 수 있는 케이블을 연결해야 합니다. 아래 자료를 참고하여 힘/토크 센서에 E91337 케이블과 W1502 케이블을 연결합니다.
케이블 작업 후, 아래 그림을 참고하여 STEP 제어기의 CANbus 커넥터와 W1502 의 PIN 맵을 대조하여 요구되는 커넥터에 맞는 케이블을 연결합니다.
커넥터와 케이블을 모두 연결하는 것으로 CANbus 통신 시스템 인터페이스 구성을 완료합니다.
CANbus Bitrate 설정
PuTTY 와 같은 SSH 를 이용하여 STEP 에 접속하고, 아래 터미널 명령어를 통해 STEP 에 기본적으로 설치 된 CAN 유틸리티를 확인할 수 있습니다. 각각의 유틸리티에 대한 설명은 STEP 통신 연결하기의 CANbus 에 자세히 설명되어 있습니다.
그 다음, ROBOTOUS 힘/토크 센서를 사용하기 위해서 STEP 과 센서 사이에 연결된 CANbus 통신을 센서의 기본 설정에 맞게 조정해야 하며, 센서 기본 설정은 아래 표와 같습니다.
| Item | Default Values | Remarks | |
|---|---|---|---|
| CAN | UART | ||
| Filtering | Filter OFF | Filter OFF | |
| Data Output Rate | 200Hz | 200Hz | |
| Message ID | Receiver ID: 100(0x64)Transmitter ID #1: 1(0x01)Transmitter ID #2: 2(0x02) | N/A | CAN only |
| Communication Setting | CAN 2.0 A, B CompatibleIdentifier: Standard IdentifierBit Rate: 1MbpsSize of Data: 8 bytes | Baud Rate: 115,200bps1 Stop BitNo ParityNo Flow ControlData Length: 8 Bits | |
Default Setting of Communication (ROBOTUS INC., 6 Axis Force Torque Sensor RFT Series Installation and Operation Manual)
위 표를 통해 알 수 있듯이, 힘/토크 센서 사용을 위해 아래 명령어로 비트레이트를 1Mbps 로 바꿔주어야 합니다.
정상적으로 비트레이트가 업데이트되면 Bit rate updating SUCCESSFULLY! 문구가 출력됩니다.
힘/토크 센서 제어
센서 설정을 완료하면 힘/토크 센서로 CANbus 메시지를 송수신하는 것이 가능합니다. 그러므로 SERCAN_send 명령어로 STEP 과 힘/토크 센서 사이에 CANbus 통신이 제대로 이루어지는지 확인해보도록 합니다. ROBOTOUS 힘/토크 센서의 CANbus 패킷 정의는 다음과 같습니다.
| Command | Command ID | No. of Parameters | w/Response Packet | Remarks |
|---|---|---|---|---|
| Read Model Name | 1(0x01) | 0 | Yes | |
| Read Serial Number | 2(0x02) | 0 | Yes | |
| Read Firmware Version | 3(0x03) | 0 | Yes | |
| Set Communication ID | 4(0x04) | 3 | Yes | CAN only |
| Read Communication ID | 5(0x05) | 0 | Yes | CAN only |
| Set Baud-rate | 6(0x06) | 1 | Yes | UART only |
| Read Baud-rate | 7(0x07) | 0 | Yes | |
| Set Filter | 8(0x08) | 2 | Yes | |
| Read Filter Setting | 9(0x09) | 0 | Yes | |
| Read F/T Data Output (once) | 10(0x0A) | 0 | Yes | |
| Start F/T Data Output | 11(0x0B) | 0 | Yes | |
| Stop F/T Data Output | 12(0x0C) | 0 | No | Available even during data output |
| Reserved | 13(0x0D) | N.A. | N.A. | |
| Reserved | 14(0x0E) | N.A. | N.A. | |
| Set Data Output Rate | 15(0x0F) | 1 | Yes | |
| Read Data Output Rate | 16(0x10) | 0 | Yes | Available even during data output |
| Set Bias | 17(0x11) | 1 | No | |
| Read Count of Overload Occurrence | 18(0x12) | 0 | Yes |
Summary of command packets (ROBOTOUS INC., 6 Axis Force Torque Sensor RFT Series Installation and Operation Manual)
Read Model Name
CANbus 통신이 제대로 이루어지는지 확인하기 위해, 먼저 힘/토크 센서로부터 Model Name 을 받아오는 과정을 진행합니다. PuTTY 를 1개 더 실행하여 아래와 같은 SERCAN_dump 명령어를 입력합니다. 명령어 입력이 완료되면 해당하는 PuTTY 는 힘/토크 센서로부터 CANbus 통신을 수신하는 터미널로 동작하게 됩니다.
아래 표를 확인하여 힘/토크 센서로부터 Model Name 을 받아오는 command 의 패킷을 찾아 (XX 0x00, NULL) STEP 에서 힘/토크 센서로 전송합니다. 이 때, 2개의 PuTTY 터미널 중 수신용 터미널 외 다른 PuTTY 에서 아래와 같은 SERCAN_send 명령어를 사용합니다.
| Receiver ID | Data Field | |||||||
|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | |
| 064 | 01 | XX | XX | XX | XX | XX | XX | XX |
패킷을 전송하고 나면, 수신용 PuTTY 가 다음과 같은 CANbus 메시지를 출력하는 것을 확인할 수 있습니다.
ROBOTOUS 힘/토크 센서의 메뉴얼을 참고하면, 이렇게 도착한 패킷은 Model Name command 와 ASCII Code 로 된 Model Name 이 같이 쓰여진 것입니다. Model Name command 인 0x1 노드의 0Byte 자리의 hex 문자를 제외하고 나머지 hex 문자 52 46 54 38 30 2D 36 41 30 31 2D 41 을 ASCII 코드표를 확인해서 텍스트 문자로 변환하면 RFT80-6A01-A 같은 Model Name 이 나오는 것을 확인할 수 있습니다.
이때, CANbus 통신이 원활하게 이루어지지 않는 문제가 발생하면, STEP 의 CAN card 에 위치한 리셋 버튼을 눌러보거나, SERCAN 펌웨어 업데이트 를 참고하여 SERCAN 펌웨어를 업데이트 하십시오.
Start/Stop F/T Data Output
CANbus 통신이 정상적으로 확인되면, 다음으로 힘/토크 센서로부터 Torque 값과 Force 값을 받아오는 과정을 진행해보도록 합니다. 이 과정 역시 2개의 PuTTY 를 실행하여 진행합니다.
아래 표와 명령어를 확인하여 힘/토크 센서로부터 실시간으로 값을 받아오는 command 의 패킷을 찾아 STEP 에서 힘/토크 센서로 전송합니다.
| Receiver ID | Data Field | |||||||
|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | |
| 064 | 0B | XX | XX | XX | XX | XX | XX | XX |
패킷을 전송하고 나면, 수신용 PuTTY 에서 다음과 같은 형식의 CANbus 메시지를 실시간으로 수신받는 것을 확인할 수 있습니다.
ROBOTOUS 힘/토크 센서의 메뉴얼을 참고하면, 이렇게 도착한 패킷은 실시간 Sensing command 와 16진수로 표현된 Force 값과 Torque 값이 같이 쓰여진 것입니다. 실시간 Sensing command 인 0x1 노드의 0Byte 자리의 hex 문자를 제외하고, 나머지 16진수들 F9 7F 07 B2 1E B9 FC D4 FB 88 05 53을 10진수로 변환하면, X, Y, Z torque value 와 X, Y, Z force value 를 구할 수 있습니다 (자세한 내용은 아래의 16진수-10진수 변환 방법을 참고하십시오).
힘/토크 센서로부터 실시간으로 Torque 값과 Force 값을 받아오는 것을 멈추고 싶다면, 실행 명령어와 해당 command 의 패킷은 다음과 같습니다.
| Receiver ID | Data Field | |||||||
|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | |
| 064 | 0C | XX | XX | XX | XX | XX | XX | XX |
16진수-10진수 변환 방법
| Data Field | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | D9 | D10 | D11 | D12 | D13 | D14 | D15 | D16 |
| ID | R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | R9 | R10 | R11 | R12 | R13 | XX | XX |
힘/토크 센서로부터 받은 패킷은 위의 표와 같은 형식을 갖춥니다. 이 때, 각 데이터 필드는 다음과 같습니다.
- R1 : Fx's upper byte, R2 : Fx's lower byte
- R3 : Fy's upper byte, R4 : Fy's lower byte
- R5 : Fz's upper byte, R6 : Fz's lower byte
- R7 : Tx's upper byte, R8 : Tx's lower byte
- R9 : Ty's upper byte, R10 : Ty's lower byte
- R11 : Tz's upper byte, R12: Tz's lower byte
각각의 upper byte 와 lower byte 에 대해 다음의 연산을 실시하면 해당하는 값의 10진수 값을 얻을 수 있습니다.
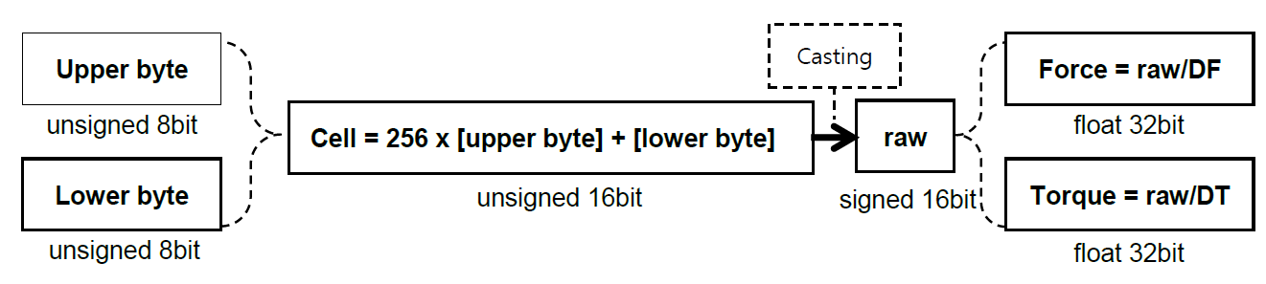
이때, RFT80-6A01 모델의 스펙에 따라 DF 는 50, DT 는 1000으로 계산합니다.
CANbus 프로젝트 컴파일
STEP 통신 연결하기의 SERCAN 예제에서는 sercan_test 예제를 살펴봤다면, 여기에서는 힘/토크 센서를 제어할 수 있도록 rtsercan_test 를 변형한 예제에 대해 설명합니다. 해당 예제는 다음과 같습니다.
#include <stdio.h>
#include <signal.h>
#include <unistd.h>
#include <sys/mman.h>
#include <stdlib.h>
#include <native/task.h>
#include <native/timer.h>
#include <rtdk.h>
#include "NRMKsercan_tp.h"
#include "NRMKhw_tp.h"
TP_PORT test_port=1;
int rtsercan_fd = -1;
RT_TASK write_task;
RT_TASK read_task;
int working=1;
//task start value
double trigger = 0;
//CANbus data to physical data
unsigned char data_field[16]; // storage buffer for data field
//..... Received CAN data Save .....
// 8 byte data of can message id is #1 save in data_field [0] ~ [7]
// 8 byte data of can message id is #2 save in data_field [8] ~ [15] // data field processing
short raw_data[6] = { 0 };
unsigned short temp;
unsigned DF=50, DT=2000; // DF, DT depend on the model, refer to 3.6.11
double ft_array[6];
void cleanup_all(void)
{
working=0;
rt_task_delete(&write_task);
rt_task_delete(&read_task);
}
void catch_signal(int sig)
//void cath_signal()
{
cleanup_all();
return;
}
void write_thread(void* arg)
{
CAN_FRAME cfame;
rt_task_set_periodic(NULL, TM_NOW, 1e9);
while (working)
{
//initial setting
//rt_printf("writing task initial setting completed... \n");
cfame.can_id=0x64;
cfame.can_dlc=8;
for (int i=0; i<8; ++i) cfame.data[i]=0x00;
//start sensing
if(trigger == 0)
{
//rt_printf("start sensing... \n");
for (int i=0; i<8; ++i){
if(i==0)
cfame.data[i]=0x0B;
else
cfame.data[i]=0x00;
}
}
RTSERCAN_write(rtsercan_fd, cfame);
rt_task_wait_period(NULL);
}
}
void read_task_proc(void *arg)
{
int res1, res2;
CAN_FRAME RxFrame1;
CAN_FRAME RxFrame2;
rt_task_set_periodic(NULL, TM_NOW, 1e6);
while (working)
{
//Get CANbus Torque value
res1=RTSERCAN_read(rtsercan_fd, &RxFrame1);
res2=RTSERCAN_read(rtsercan_fd, &RxFrame2);
if (res1==SERCAN_ERR_FREE && res2==SERCAN_ERR_FREE)
{/*
rt_print_CANFrame(RxFrame1);
rt_print_CANFrame(RxFrame2);
*/
//CANbus data to Torque data
for(int i=0; i<8; ++i)
{
data_field[i] = (unsigned char) RxFrame1.data[i];
data_field[i+8] = (unsigned char) RxFrame2.data[i];
}
for (int idx = 0; idx < 6; idx++)
{
temp = data_field [2 * idx + 1] * 256;
temp += data_field [2 * idx + 2];
raw_data[idx] = (signed short)temp; // variable casting
}
// Conversion from signed short data to float data and data scaling
// Set Force/Torque Original
for (int n = 0; n < 3; n++)
{
ft_array[n] = (((float)raw_data[n] ) / DF); // refer to 3.6.11
ft_array[n + 3] = (((float)raw_data[n + 3] ) / DT); // refer to 3.6.11
}
static unsigned int print_count = 0;
if (print_count % 1000 == 0)
{
// rt_printf("\nX direction Force: %f \n", ft_array[0]);
// rt_printf("Y direction Force: %f \n", ft_array[1]);
// rt_printf("Z direction Force: %f \n\n", ft_array[2]);
// rt_printf("X direction Torque: %f \n", ft_array[3]);
// rt_printf("Y direction Torque: %f \n", ft_array[4]);
// rt_printf("Z direction Torque: %f \n\n", ft_array[5]);
printf("\nX direction Force: %f \n", ft_array[0]);
printf("Y direction Force: %f \n", ft_array[1]);
printf("Z direction Force: %f \n\n", ft_array[2]);
printf("X direction Torque: %f \n", ft_array[3]);
printf("Y direction Torque: % \n", ft_array[4]);
printf("Z direction Torque: % \n\n", ft_array[5]);
//print_count = 0;
}
print_count++;
trigger++;
}
/*
if(trigger >= 10)
{
rt_printf("stop sensing... \n");
CAN_FRAME cfame;
cfame.can_id=100;
cfame.can_dlc=8;
for (int i=0; i<8; ++i)
{
if(i==0)
cfame.data[i]=12;
else
cfame.data[i]=0;
}
RTSERCAN_write(rtsercan_fd, cfame);
break;
}
*/
rt_task_wait_period(NULL);
}
}
int main(int argc, char* argv[])
{
signal(SIGTERM, catch_signal);
signal(SIGINT, catch_signal);
/* no memory-swapping for this programm */
mlockall(MCL_CURRENT | MCL_FUTURE);
printf("preventing memory-swapping for this program... \n");
// Perform auto-init of rt_print buffers if the task doesn't do so
rt_print_auto_init(1);
// open rtsercan*******************
rtsercan_fd=RTSERCAN_open();
if (rtsercan_fd < 0) return 1;
printf("rtsercan is opened! \n");
//********************************
//-------------------------------------------------------
printf("creating RT_task... \n");
rt_task_create(&write_task, "write_task", 0, 99, 0);
rt_task_start(&write_task, &write_thread, NULL);
printf("write task created... \n");
rt_task_create(&read_task, "read_task", 0, 99, 0);
rt_task_start(&read_task, &read_task_proc, NULL);
printf("read task created... \n");
pause();
return 0;
}
위와 같이, rtsercan_test 예제의 main.cpp 파일을 위의 코드로 된 main.cpp 파일로 교환하는 것만으로도 힘/토크 센서로부터 값을 받아오는 프로젝트를 완성할 수 있습니다. 이후, 실행을 위해 프로젝트 컴파일을 진행해야하며, 이 과정은 EtherCAT CORE 예제의 8. EtherCAT 프로젝트 컴파일 과정과 동일합니다.
CANbus 어플리케이션 실행
CANbus 어플리케이션을 실행은 EtherCAT 어플리케이션과 동일하게 WinSCP 프로그램을 통해 파일을 STEP 에 전송하여 진행합니다. 실행 방법에 대한 자세한 내용은 7. EtherCAT 어플리케이션 실행 을 참고하십시오.
