로봇 시뮬레이션
이 장에서는 Gazebo 시뮬레이터를 사용하여 Moby 로봇 모델을 시뮬레이션 환경에서 실행하는 방법을 설명합니다. 이를통해 물리적 로봇 없이 로봇을 테스트하고 개발하는 용도로 사용할 수 있습니다.
패키지 구성
이 장에서는 다음 패키지를 사용합니다.: moby_gazebo, moby_mapping, moby_navigation moby_gazebo 패키지는 시뮬레이션 로봇에 대한 묘사을 포함하고 있으며, moby_mapping은 가상 로봇을 사용한 맵핑 기능을, moby_navigation은 가상 로봇을 사용한 주행 기능을 포함하고 있습니다.
실행
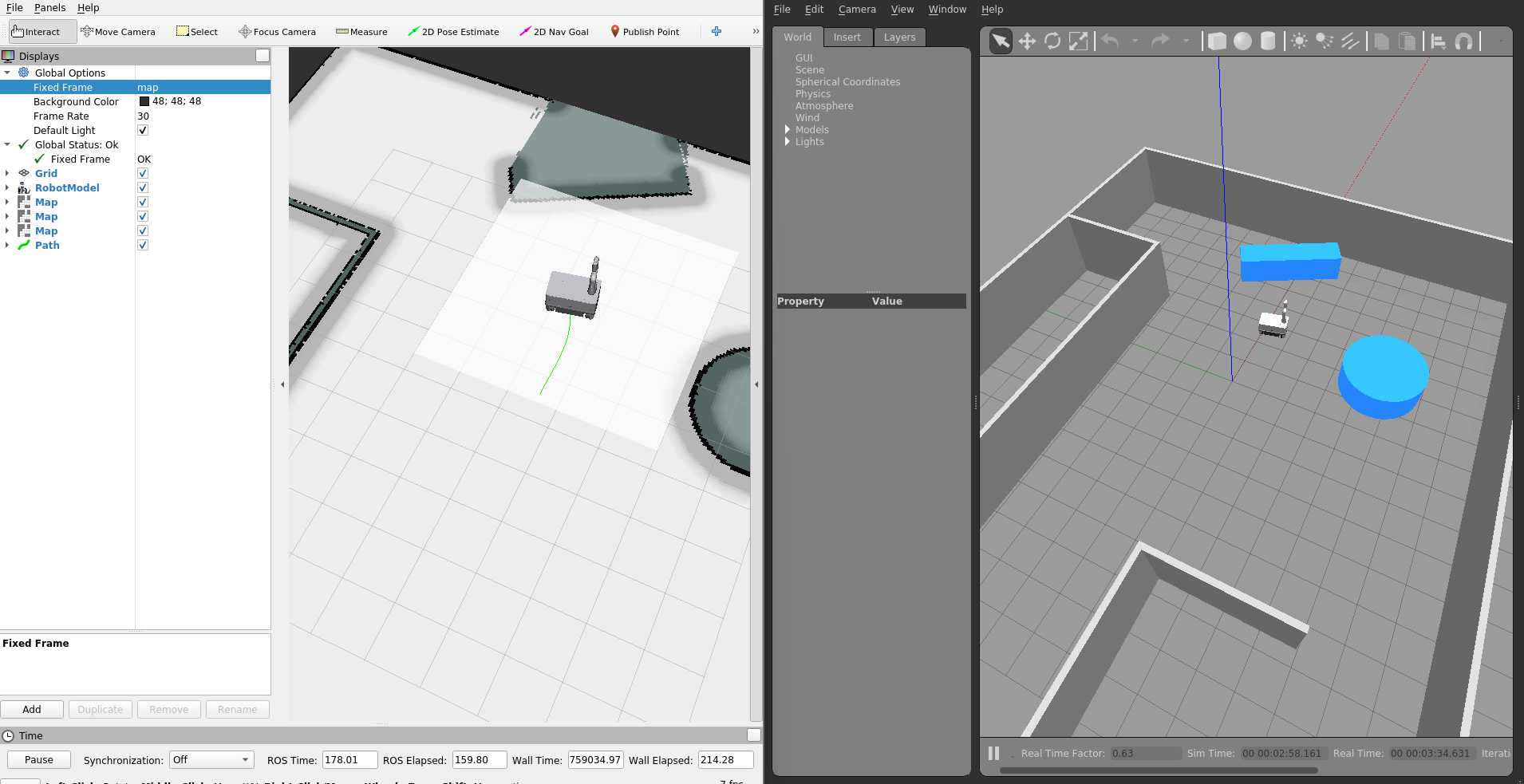
아래 명령을 통해 Moby 로봇 모델이 로드된 Gazebo 시뮬레이터를 실행합니다.
명령어를 실행하면 아래와 같이 Gazebo 창과 Rviz 창이 실행됩니다.
맵핑 시작하기
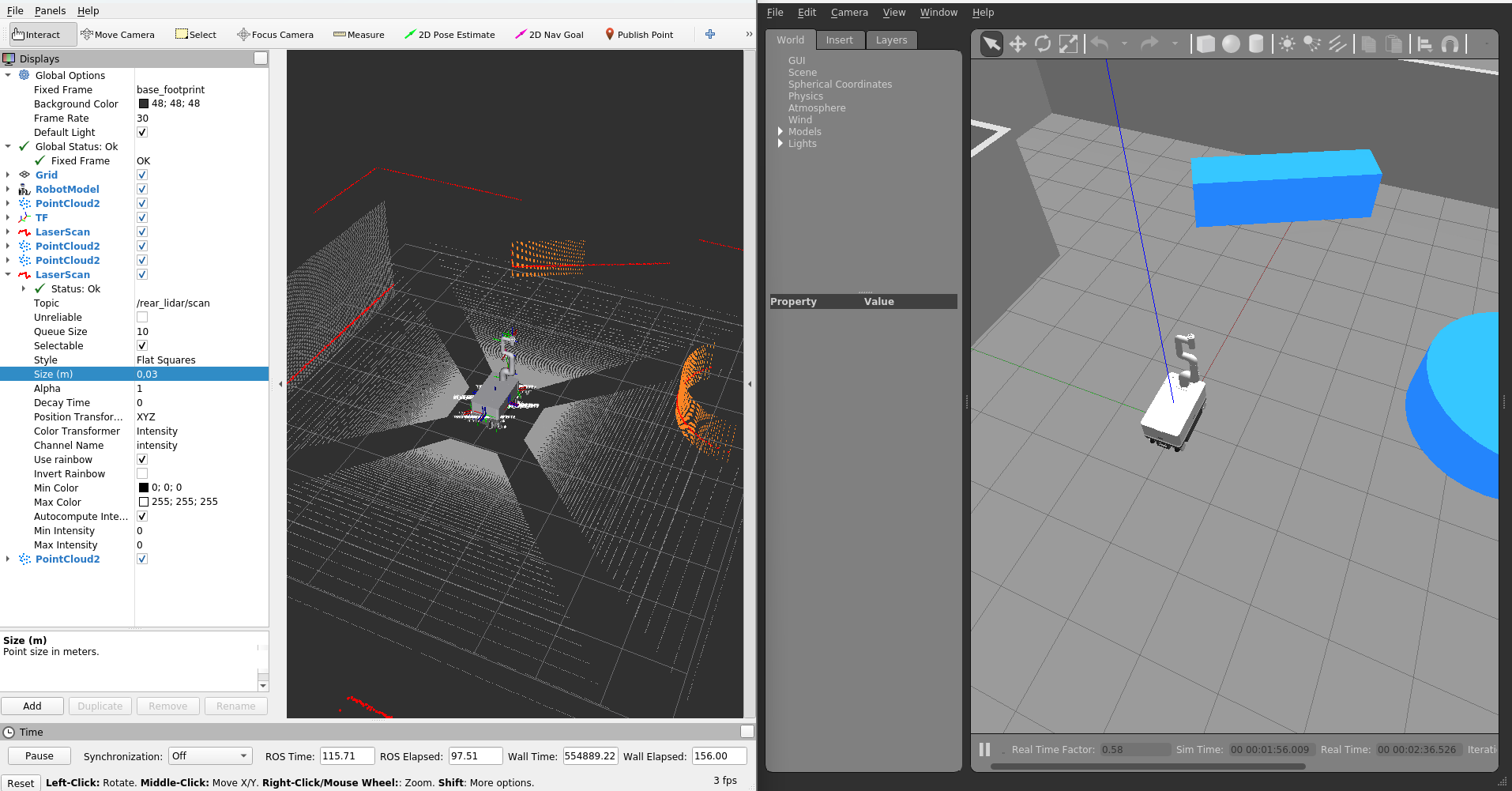
Gazebo 시뮬레이터에서 mapping 기능을 사용하기 위해 아래 명령을 실행합니다.
- Slam toolbox
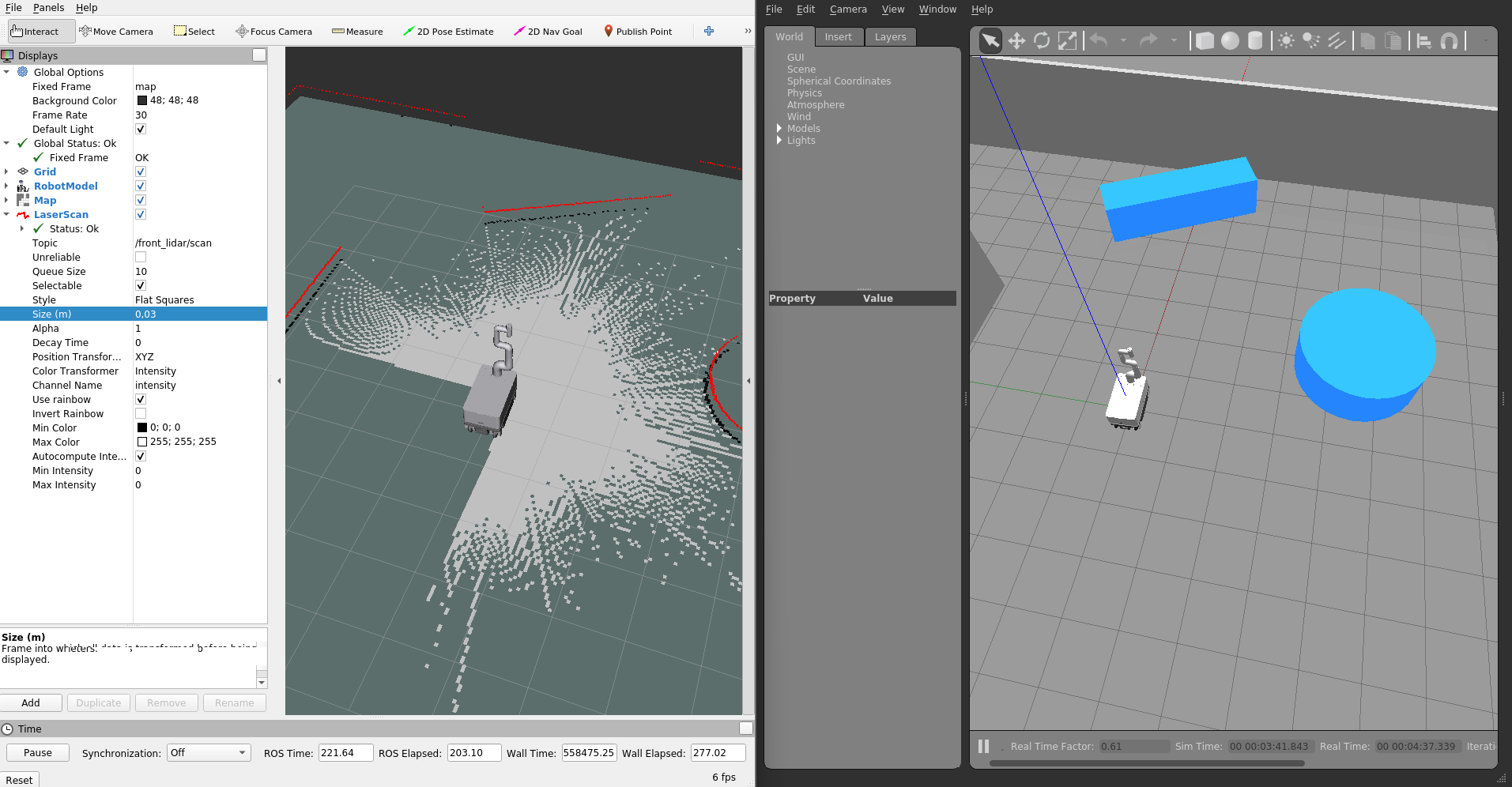
- Rtabmap
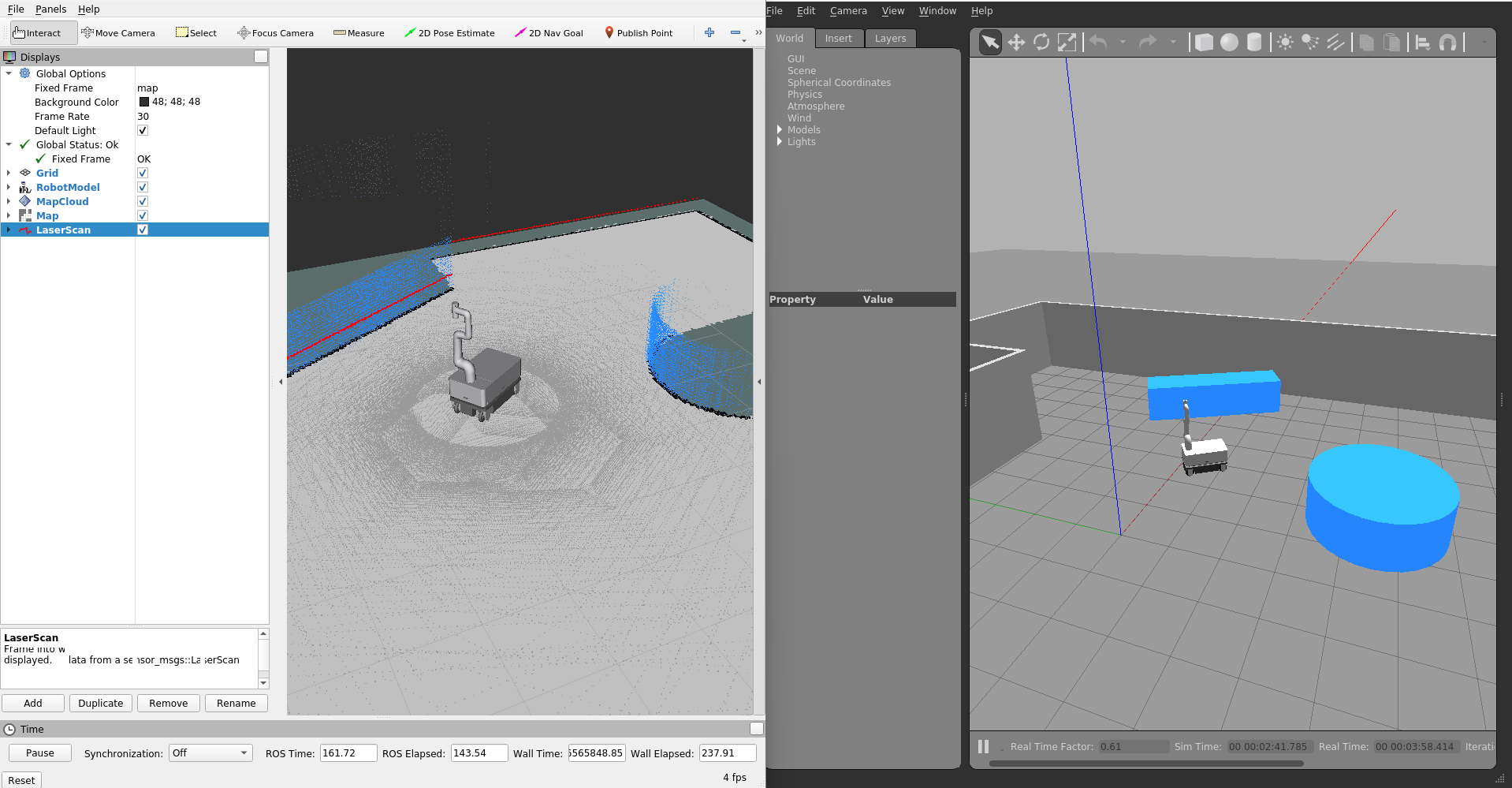
주행 시작하기
Gazebo 시뮬레이터에서 navigation 기능을 사용하기 위해 gazebo 로봇을 시작하고, 아래 명령을 실행합니다.