설치 및 설정 (Ubuntu)
판매정책
IndySDK는 연구소 및 대학과 같은 비영리 조직에만 제공됩니다. IndySDK는 뉴로메카와의 합의를 통해 사용자 라이선스를 받은 후에 사용할 수 있습니다. 자세한 정보는 메일을 통해 문의해주시기 바랍니다 technical-support@neuromeka.com.
Indy 개발 생태계 개요
Indy 개발 생태계는 Indy 로봇을 위한 제어 알고리즘의 생성 및 구현을 간소화하도록 설계되었습니다. 사용자 정의 제어 알고리즘을 개발하려면 먼저 IndySDK를 사용하여 코드를 작성하세요. CMake는 프로젝트 구성과 종속성 관리를 단순화해 줍니다. 이후, CLion에서 프로젝트를 빌드하여 다양한 기능을 갖춘 개발 환경을 활용하거나 터미널을 사용하여 더 큰 제어권을 얻을 수 있습니다. 마지막으로, IndyDCP3 통신 프로토콜을 통해 사용자 정의 알고리즘이 로봇과 실시간으로 통신할 수 있으며, 이를 통해 테스트 및 개선이 가능합니다. 아래는 IndySDK 생태계의 주요 구성 요소입니다:
-
IndySDK: IndySDK는 개발자가 자신만의 제어 알고리즘을 생성, 구현 및 테스트할 수 있게 하는 API 모음입니다. IndyDCP3를 통해 Indy 로봇과 상호작용할 수 있으며, 모션 제어, 센서 통합, 데이터 처리와 같은 작업을 쉽게 관리할 수 있습니다.
-
CMake: CMake는 프로젝트의 컴파일 과정을 관리하는 강력한 빌드 시스템입니다. 프로젝트의 설정을 기반으로 빌드 파일을 생성하며, IndySDK 및 기타 의존성과 함께 애플리케이션이 어떻게 빌드되고 연결되는지 맞춤화할 수 있습니다.
-
CLion 및 터미널: CLion은 C++ 프로젝트를 위한 통합 개발 환경(IDE)으로, 사용자 친화적인 인터페이스를 제공합니다. CMake와 원활하게 통합되어 스마트 코드 자동 완성 및 디버깅 도구 등의 기능을 제공합니다. 반면, 명령줄 인터페이스에 익숙한 사용자라면 터미널을 통해 CMake 명령어를 사용하여 직접 빌드 과정을 제어할 수 있습니다.
-
IndyDCP3: IndyDCP3는 Indy 로봇과 외부 시스템 간의 통신을 가능하게 합니다. 명령을 보내고 데이터를 수신하는 구조화된 프레임워크를 제공하여 로봇의 실시간 제어와 모니터링을 지원합니다.
-
Supporting Tools and Resources: IndySDK GitLab 저장소에는 API 사용법을 안내하는 예제 코드와 README 파일이 포함되어 있어 사용자가 자신의 알고리즘을 효과적으로 구현할 수 있도록 돕습니다.
이 구성 요소들이 어떻게 상호작용하는지 이해함으로써 프로젝트를 성공적으로 설치하고 빌드하는 데 더 잘 준비될 수 있습니다. 다음 섹션에서는 개발 환경을 설정하고 Indy SDK를 사용해 작업을 시작하는 데 필요한 구체적인 단계들을 안내할 것입니다.
설치하기
아래 링크를 통해 설치 파일을 순서대로 다운로드 받으신 후 순서대로 설치해주시기 바랍니다. STEP2 사용자와 STEP3 사용자의 설치환경과 Windows, Linux 사용자의 설치환경이 다르기 때문에 사용하는 제어기와 개발PC의 OS에 맞추어 설치를 진행해주시기 바랍니다.
Note
사용 중인 컨트롤러 버전을 확인해 주세요:
- STEP2: 이 컨트롤러는 기본적으로 표준 Indy 라인업의 실시간 제어를 담당합니다. IndyCB를 사용 중이라면, STEP2를 사용하고 있을 가능성이 큽니다.
- STEP3: STEP3는 고급 연구 및 개발을 위해 설계된 고성능 컨트롤러입니다. 주로 IndyRP-2와 같은 모델에서 사용됩니다.
1. PlatformSDK 설치
2. IndyFramework 설치
3. NRMKFoundation-UpdatePack3.2 설치
다운로드 받은 파일을 차례로 설치를 하면 필요한 SDK 설치가 완료됩니다.
다음 섹션을 참조하여 Ubuntu 및 Windows 플랫폼에서 CMake를 사용하여 파일을 설치하고 IndySDK 개발 환경을 구축하는 방법에 대한 자세한 지침을 확인하십시오.
Ubuntu에 파일 설치
1. 파일 추출:
- 다운로드한 각 파일을 추출합니다. 각 추출된 디렉토리 안에는
install.sh스크립트가 있습니다.
2. 설치 스크립트 실행:
- 설치 스크립트 실행
참고
/opt 디렉토리에 디렉토리를 생성할 때 권한 문제로 설치가 실패하면, sudo를 사용하여 스크립트를 실행해 보십시오
3. 설치 확인:
- 설치가 완료된 후,
/opt/neuromeka디렉토리로 이동합니다: : - 다음 폴더들이 생성된 것을 확인할 수 있습니다:
- NRMKFoundation
- NRMKPlatformPC2 (STEP2)
- NRMKPlatformPC3 (STEP3)
4. NRMKFoundation 폴더 업데이트:
/opt/neuromeka/NRMKFoundation폴더에 이전 단계에서 다운로드한NRMKFoundation-UpdatePack3.2파일을 추출하여 얻은 파일들을 배치합니다. 기존 파일을 덮어씁니다.
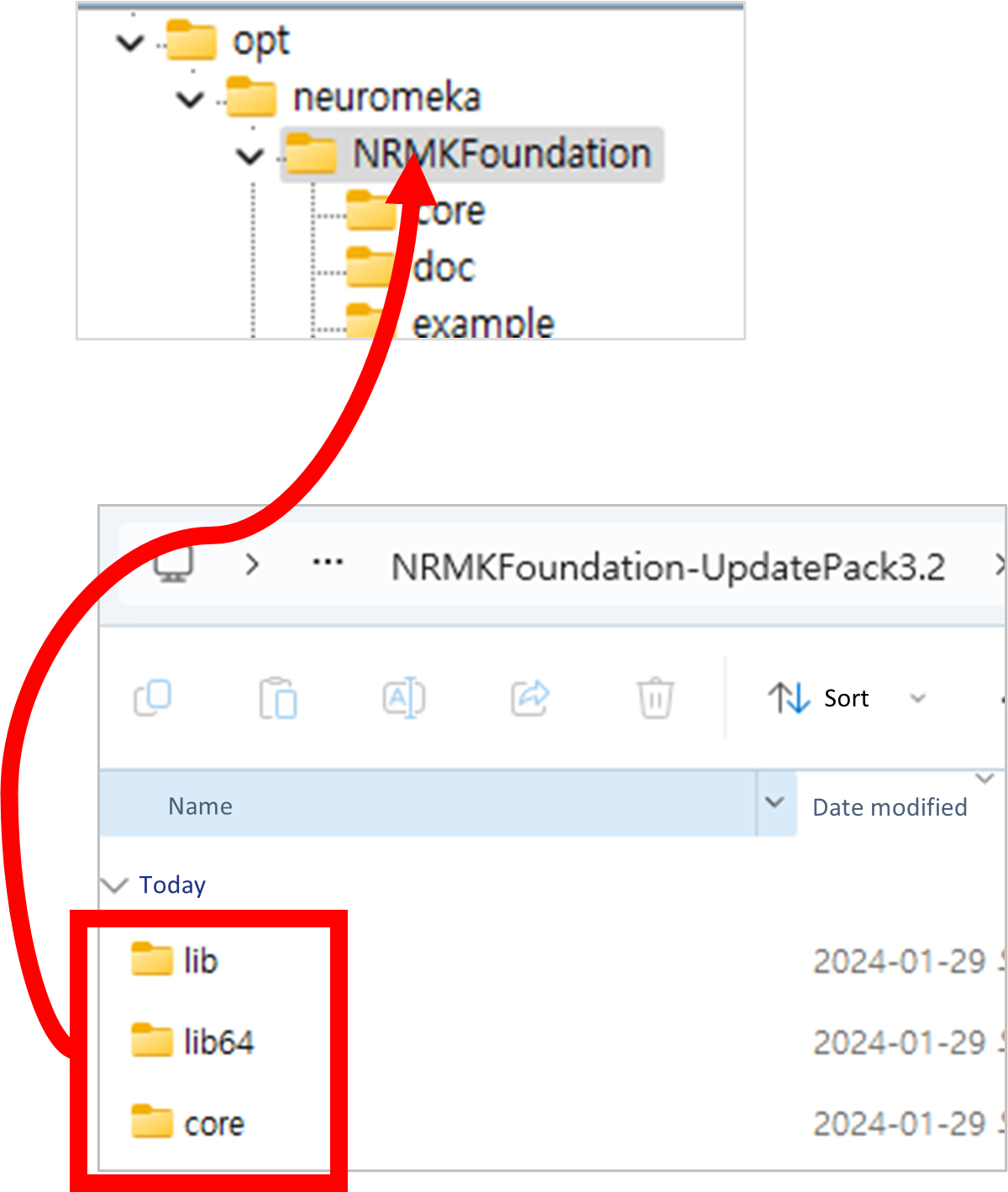
Overwriting Existing Files
Ubuntu용 IndySDK 개발 환경
- IndySDK 개발 환경은 CMake를 활용합니다. CMake는 빌드 자동화, 테스트, 패키징 및 소프트웨어 설치를 위한 크로스 플랫폼, 무료 및 오픈 소스 소프트웨어 도구입니다.
-
다음 섹션에서는 두 가지 예제 빌드 방법을 설명합니다:
Linux Terminal
필수 조건
시작하기 전에 다음 필수 조건을 충족해야 합니다:
- CMake: CMake가 설치되어 있어야 합니다.
- 빌드 도구 및 라이브러리: CMake에 필요한 필수 빌드 도구 및 라이브러리를 설치합니다.
1. CMake 다운로드 및 압축 해제
a. 지정된 다운로드 디렉토리로 이동합니다:
b. 최신 버전의 CMake를 다운로드합니다 (3.20.0을 적절한 버전으로 교체): c. 다운로드한 아카이브를 압축 해제합니다:2. CMake 컴파일 및 설치
a. CMake가 압축 해제된 디렉토리로 이동합니다:
b. 다음 명령을 실행하여 CMake를 컴파일하고 설치합니다. 이 과정은 시간이 걸릴 수 있으므로 중단하지 마십시오: c. CMake가 올바르게 설치되었는지 버전을 확인합니다:3. IndySDK GitLab 저장소에서 소스 코드를 다운로드합니다.
- IndySDK GitLab 저장소에는 다양한 API가 포함되어 있어 시뮬레이션 및 실제 환경에서 제어 알고리즘을 쉽게 생성, 구현 및 테스트할 수 있습니다. API 사용 예시는
../src_cpp/PluginComponents디렉토리에서 확인할 수 있으며, 알고리즘을 설명하는 README 파일도 포함되어 있습니다. - IndySDK를 사용하려면 먼저 GitLab 저장소에서 소스 코드를 다운로드해야 합니다. 이 단계를 완료하기 전에 적절한 브랜치를 영업 담당자에게 확인하시기 바랍니다.
참고
Neuromeka의 GitLab 액세스를 받지 못한 경우, 영업 담당자에게 문의하십시오.
4. 디렉토리 이름 수정
a.
b. 환경 변수 위치에서CMakeLists.txt파일을 편집합니다:Drivers를bin으로 변경하여 17, 18, 20, 21번째 줄을 업데이트합니다.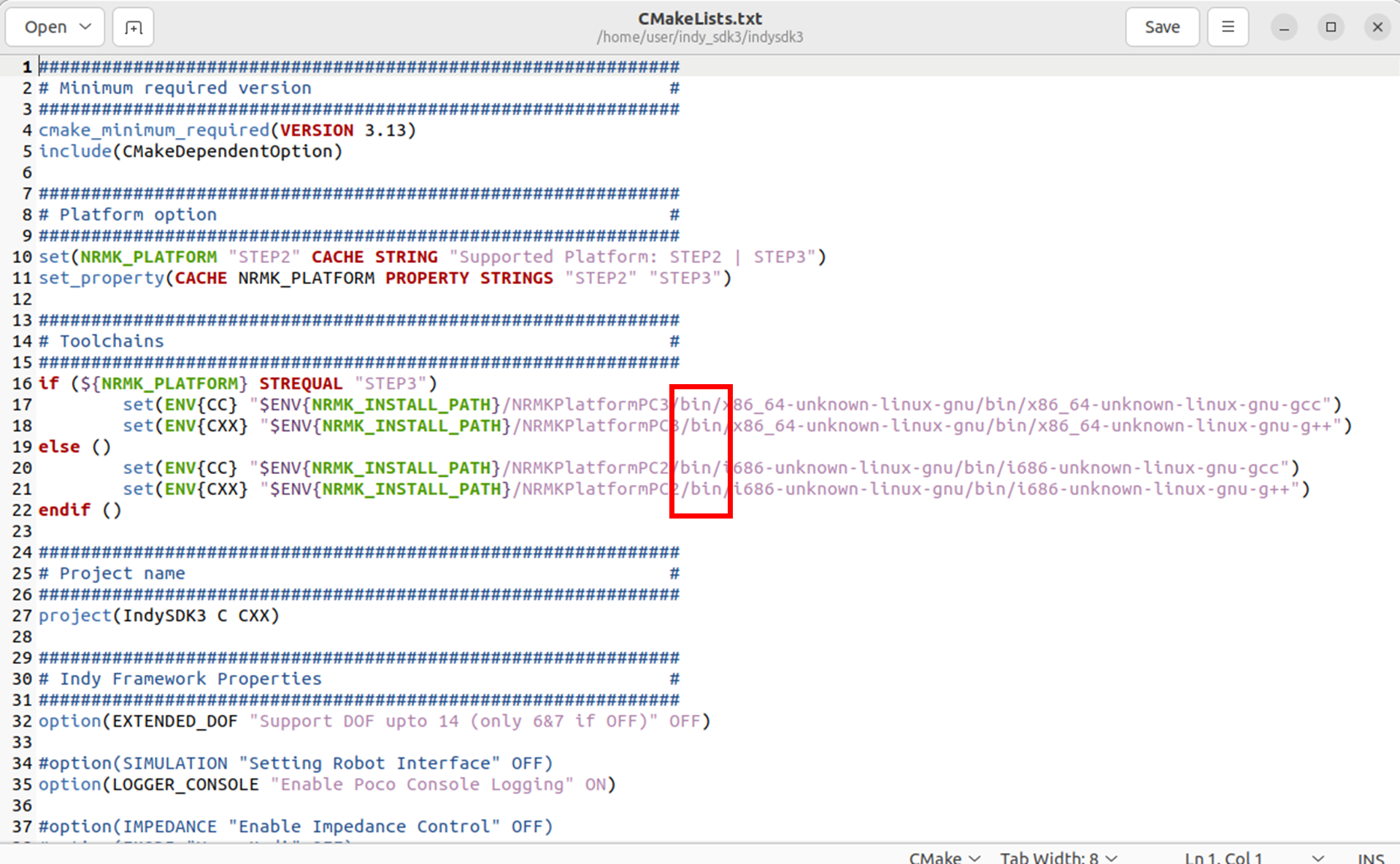
Changing "Drivers" to "bin"
5. 환경 변수 등록
a. 터미널을 열고 스크립트 디렉토리로 이동합니다:
b. 다음 명령을 실행하여 환경 변수를 등록합니다:- STEP2 제어 박스(CB)용:
- STEP3 제어 박스(CB)용:
6. 프로젝트 빌드를 위한 명령 실행:
a. 프로젝트 빌드를 구성합니다:
참고
STEP3을 사용하는 경우, STEP2 대신 STEP3을 입력하십시오.
b. 프로젝트를 빌드합니다:
c. 빌드된 파일을 설치합니다: d. 빌드가 완료되면 빌드된 파일은 SDK 코드 저장소의 다음 위치에 comp 파일 타입으로 저장됩니다:your_source_directory/IndyDeployment/PluginComponentsCLion
SDK는 C 및 C++ 프로젝트의 개발 경험을 향상시키기 위해 CLion을 통합 개발 환경(IDE)으로 사용합니다. CLion은 스마트 코드 자동 완성, 실시간 코드 분석, 통합 디버깅 기능 등을 제공합니다.
CLion은 CMake와 통합되어 있어 개발자가 IDE 내에서 직접 프로젝트 빌드를 관리할 수 있습니다. CLion에서 프로젝트를 열면, CMake 설정 파일(CMakeLists.txt)을 자동으로 감지하고 이를 사용해 프로젝트를 구성합니다. 개발자는 CLion에서 CMake를 호출하여 필요한 빌드 파일을 생성하고 빌드 프로세스를 관리하므로, 프로젝트를 쉽게 빌드하고 실행하며 디버깅할 수 있습니다.
필수 조건
시작하기 전에 필요한 필수 조건을 확인하세요:
- CLion: CLion이 설치되지 않은 경우 다음 명령을 사용하여 설치하세요:
1. IndySDK GitLab 저장소에서 소스 코드를 다운로드합니다.
- IndySDK GitLab 저장소에는 다양한 API가 포함되어 있어 시뮬레이션 및 실제 환경에서 제어 알고리즘을 쉽게 생성, 구현 및 테스트할 수 있습니다. API 사용 예시는
../src_cpp/PluginComponents디렉토리에서 확인할 수 있으며, 알고리즘을 설명하는 README 파일도 포함되어 있습니다. - IndySDK를 사용하려면 먼저 GitLab 저장소에서 소스 코드를 다운로드해야 합니다. 이 단계를 완료하기 전에 적절한 브랜치를 영업 담당자에게 확인하시기 바랍니다.
2. 환경 변수 등록
Ubuntu PC에서 빌드를 하려면 다음 단계를 따르세요:
a. 터미널을 열고 다음 디렉토리로 이동합니다:
b. 다음 명령을 실행하여 환경 변수를 등록합니다:- STEP2 제어 박스(CB)용:
- STEP3 제어 박스(CB)용:
3. CLion 열기
a. 같은 터미널 창에서 CLion을 실행합니다:
4. CLion에서 CMake 구성
아래 단계들은 CLion에서 개발 환경을 설정하고 프로젝트의 빌드 시스템을 구성하는 과정을 설명합니다.
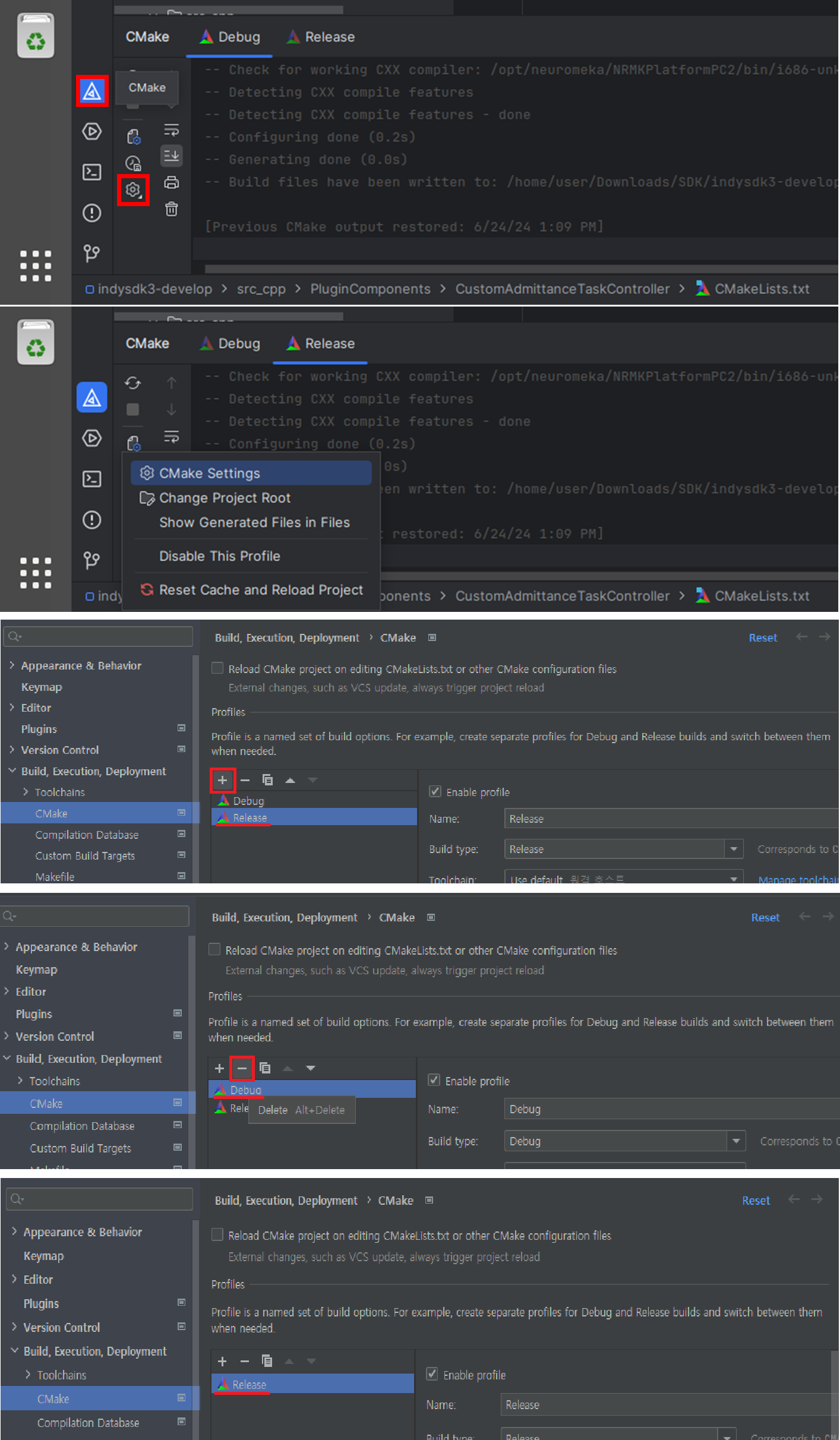
Configure CMake in CLion
Note
아이콘의 위치는 CLion 버전에 따라 다를 수 있습니다. 필요한 컴파일 버튼을 찾을 수 없다면 다음 설정을 확인해 보세요:
- Toolbar Visibility
- 기본 레이아웃 복원
- 올바른 CMake 설정 여부 확인
- 프로젝트에 유효한 CMakeLists.txt 파일이 있는지 확인
- CLion이 최신 버전인지 확인
a. GitLab에서 다운로드한 소스 코드 파일로 이동합니다. 이곳에서 프로젝트를 편집하거나 빌드할 수 있습니다.
b.
CMake버튼을 클릭하여 빌드 시스템 설정을 관리합니다.c.
Gear아이콘(설정)을 클릭하여 프로젝트 설정에 접근합니다.d.
CMake Settings을 선택하여 프로젝트의 빌드 구성을 조정합니다.e.
+버튼을 클릭하여 새 구성을 추가합니다. 최종 배포를 위해 프로젝트를 최적화하려면 Release를 선택합니다.5. CMake 구성 수정
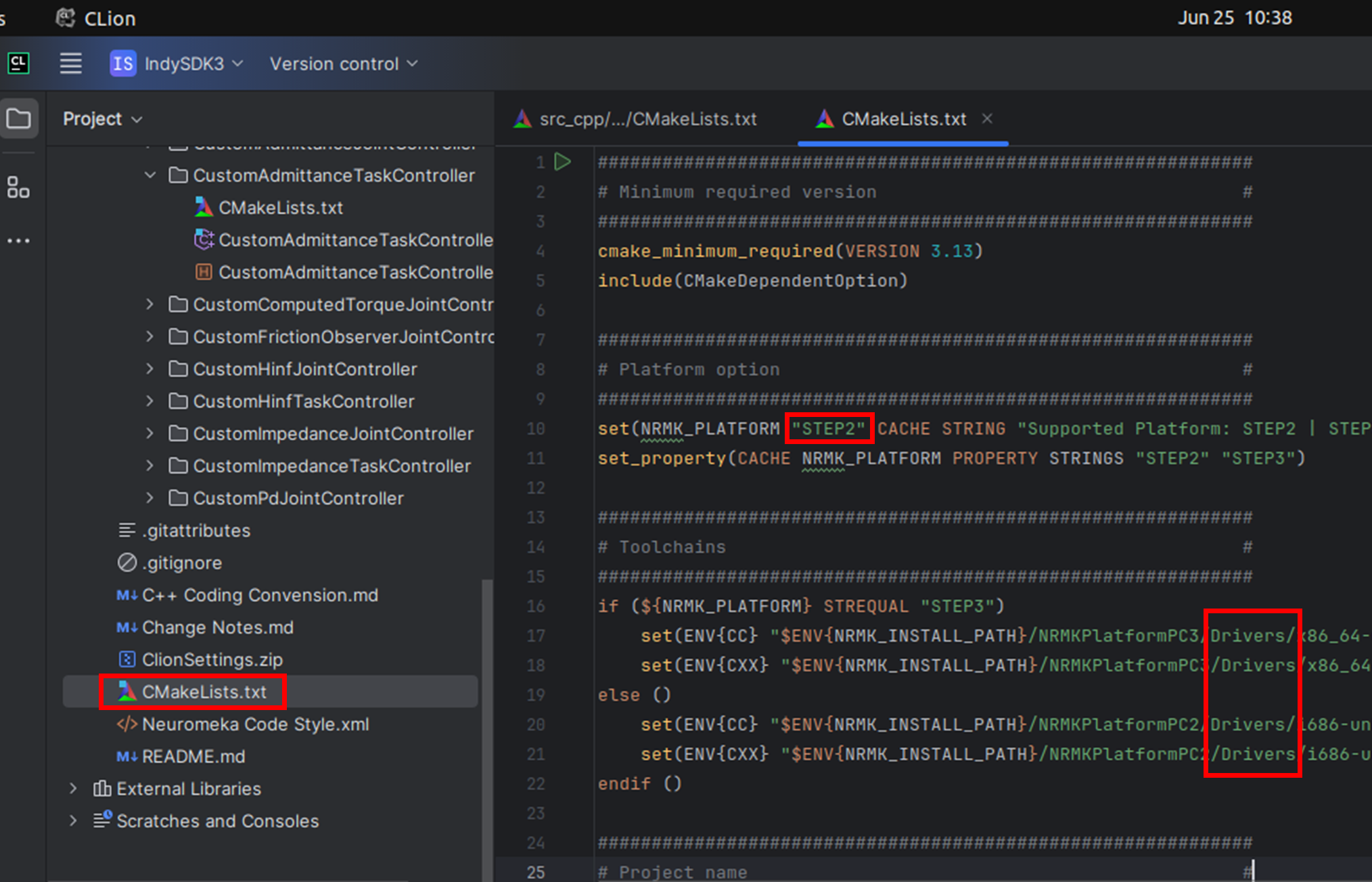
Modify CMake Configuration
a.
CMakeLists.txt파일을 엽니다.b.
NRMK_PLATFORM을 사용 중인 STEP (STEP2 또는 STEP3)에 맞게 설정합니다.c. 환경 변수 위치에서 17, 18, 20, 21번째 줄의
Drivers를bin으로 업데이트합니다.d. 변경 사항을 저장합니다.
6. 캐시 재설정 및 프로젝트 다시 로드
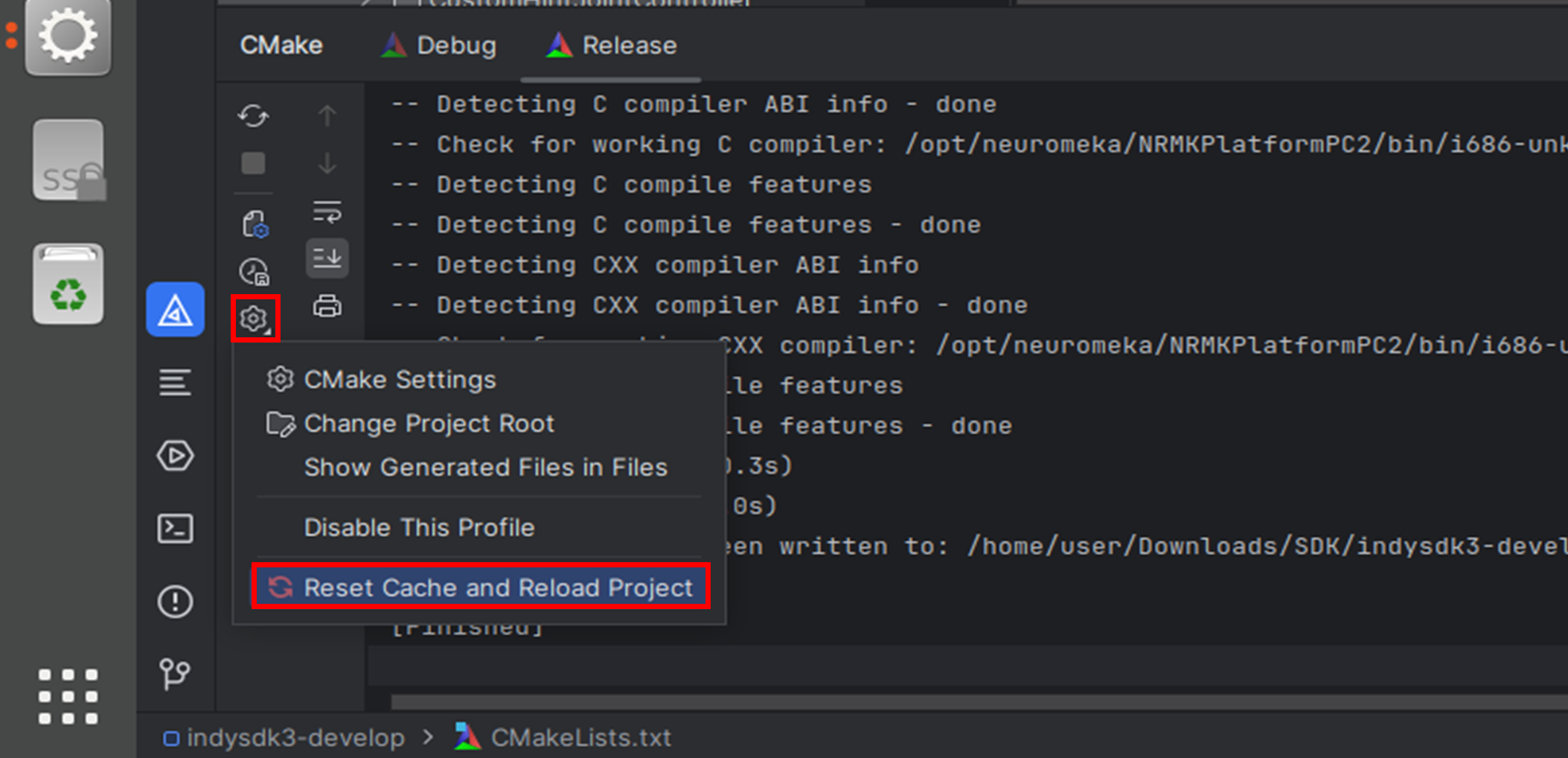
Reset Cache and Reload Project
a. CMake 설정을 완료한 후,
톱니바퀴아이콘을 클릭합니다.b.
캐시 재설정 및 프로젝트 다시 로드를 선택합니다.7. 프로젝트 빌드
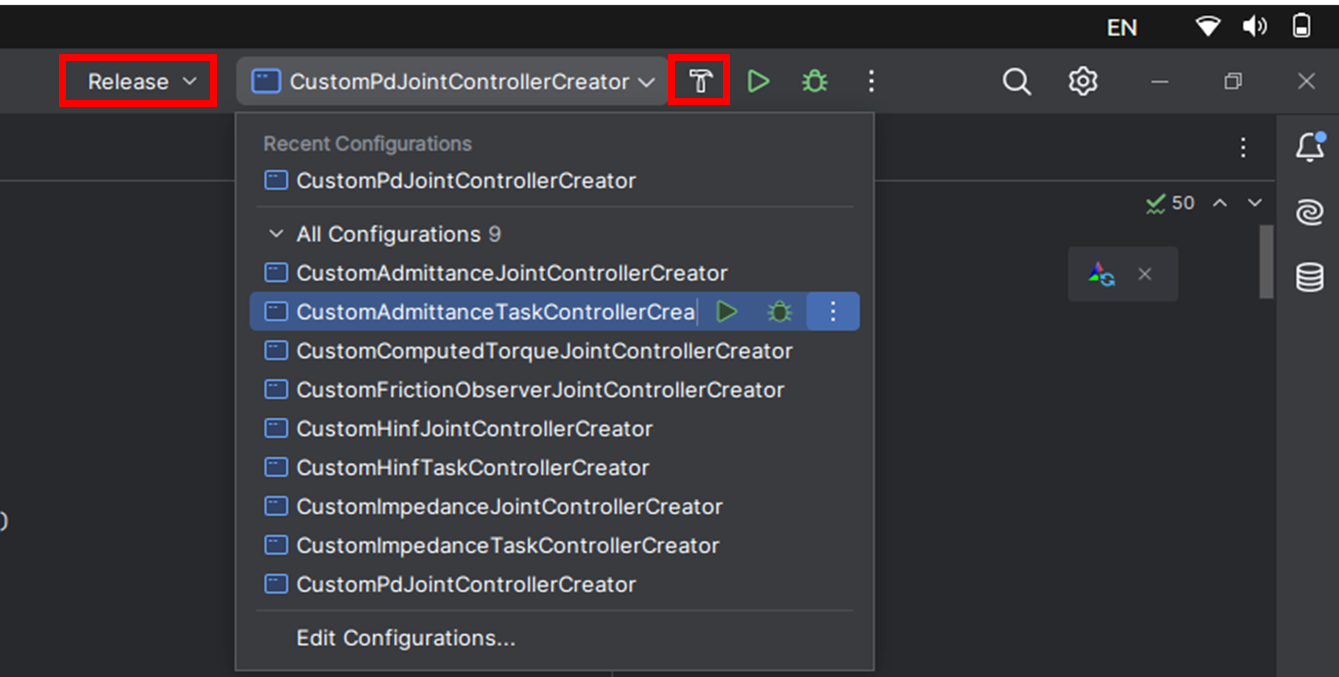
Build the Project
a. 빌드할 컨트롤러를 드롭다운에서 선택합니다.
b.
망치버튼을 클릭하여 빌드를 시작합니다.8. 빌드 완료
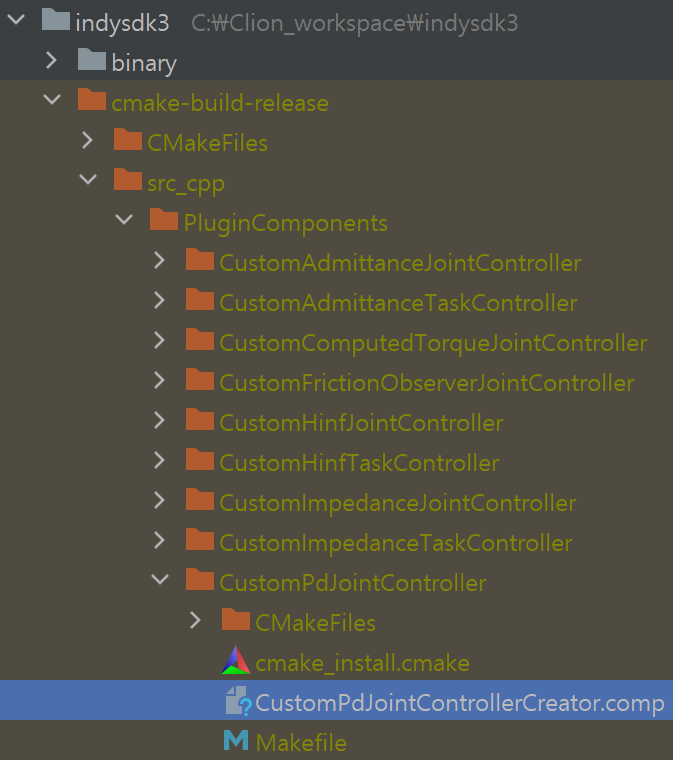
Verify Build Completion
a. 빌드가 완료되면, 빌드된 파일은
cmake-build-release/src_cpp/PluginComponents폴더에 저장됩니다.
