IndySDK
개요
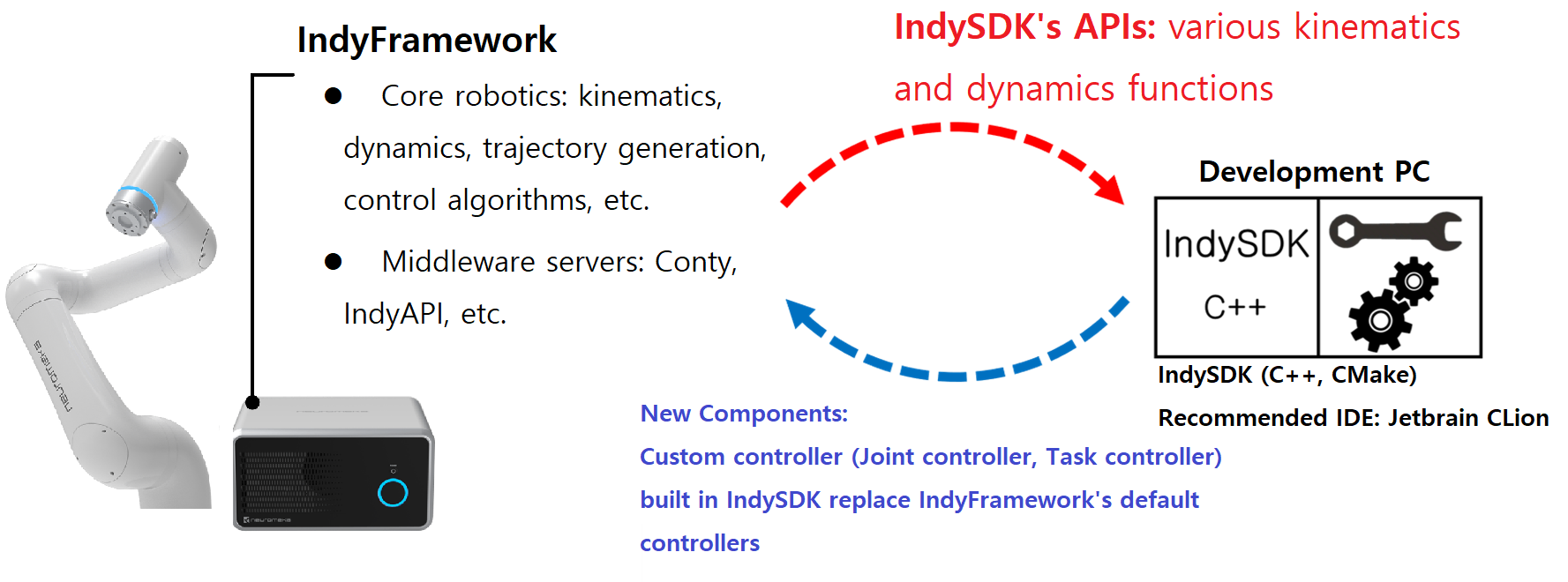
IndySDK는 뉴로메카의 협동로봇을 위한 고급 제어 프레임워크인 Indy Framework의 기능을 확장하여 제공되는 개발 환경 및 툴킷입니다. 이 SDK를 통해 개발자는 로봇의 각 관절에 대한 저수준(low-level) 실시간 토크 명령을 직접 구현하고 적용할 수 있으며, 이를 통해 로봇의 제어 시스템을 맞춤 설정할 수 있습니다.
Note
IndySDK는 연구 목적을 위한 비영리 단체에게만 제공됩니다.
IndySDK는 사용자가 기존의 Indy Framework 구성 요소인 관절공간제어기(MoveJ) 및 작업공간제어기(MoveL)를 자체 구현한 제어기로 대체할 수 있도록 지원합니다. 또한, 직접 개발한 제어기를 티치펜던트 Conty를 통해 쉽게 실행할 수 있도록 합니다. 이를 통해 다음과 같은 이점을 제공합니다:
- 호환성: IndySDK를 사용해도 기존의 Indy API 및 Conty 환경을 계속 사용할 수 있습니다.
- 안전성: 제어 알고리즘의 실패 또는 오동작으로 인한 로봇의 비정상 동작을 Indy Framework가 감지하고 비상 정지를 수행합니다.
- 단순성: IndySDK는 관절공간 제어기 (MoveJ)와 작업공간 제어기 (MoveL) 요소만 직접 컴파일 할 수 있는 템플릿 제공을 통해 복잡한 로봇 제어 알고리즘과 직접 토크 입력을 사용자가 쉽고 단순하게 구현 할 수 있도록 합니다.
- 확장성 및 재사용성: 사용자는 자신이 개발한 제어기 컴포넌트를 다양한 로봇에 적용하고, 뉴로메카에서 제공하는 제어 알고리즘 예제를 활용하여 새로운 제어기를 개발할 수 있습니다.
Git 저장소
Neuromeka Git 저장소에서는 다양한 예제 소스 코드를 제공합니다. 이 문서는 IndySDK의 기본 설치부터 로봇 제어 예제에 이르기까지 다양한 측면을 소개하며, 사용자들이 IndySDK를 효과적으로 사용하는 방법을 배우도록 돕습니다.
Notes
Git 저장소에 접근하려면 IndySDK 라이선스를 받은 후 Neuromeka 저장소에 초대된 IndySDK 사용자의 계정이 필요합니다. 아직 IndySDK 라이선스를 발급받지 못한 경우 영업 담당자에게 문의해 주시기 바랍니다.
