물체 인식 모델
데이터 수집
물체 감지(픽 앤 플레이스)를 위한 데이터 수집
딥러닝 알고리즘을 학습하기 위해서는 데이터 수집이 필수적입니다. 물체 감지 데이터의 경우에는, CAD(.stl) 파일이 필요합니다. 3D scanner 혹은 별도의 CAD 소프트웨어를 사용해 stl 파일을 준비하십시오.
- IndyEye Web: 학습할 물체의 CAD 파일 업로드
- 컴퓨터에서
{IndyEye 서버 IP}:8088/web접속 - CAD 탭 클릭
- Upload 버튼을 눌러서 CAD(*.stl) 파일을 IndyEye 서버에 업로드
- 컴퓨터에서
- 앱: 학습데이터 생성 준비
- 로봇 연결
- 학습 탭 클릭
- 앱: CAD 모델 불러오기
- 작업 이름 (학습 데이터셋 이름) 설정
- 객체 목록에서 추가 버튼을 눌러 학습하고자 하는 물체의 CAD 파일 추가
- 앱: CAD 모델 위치 조정
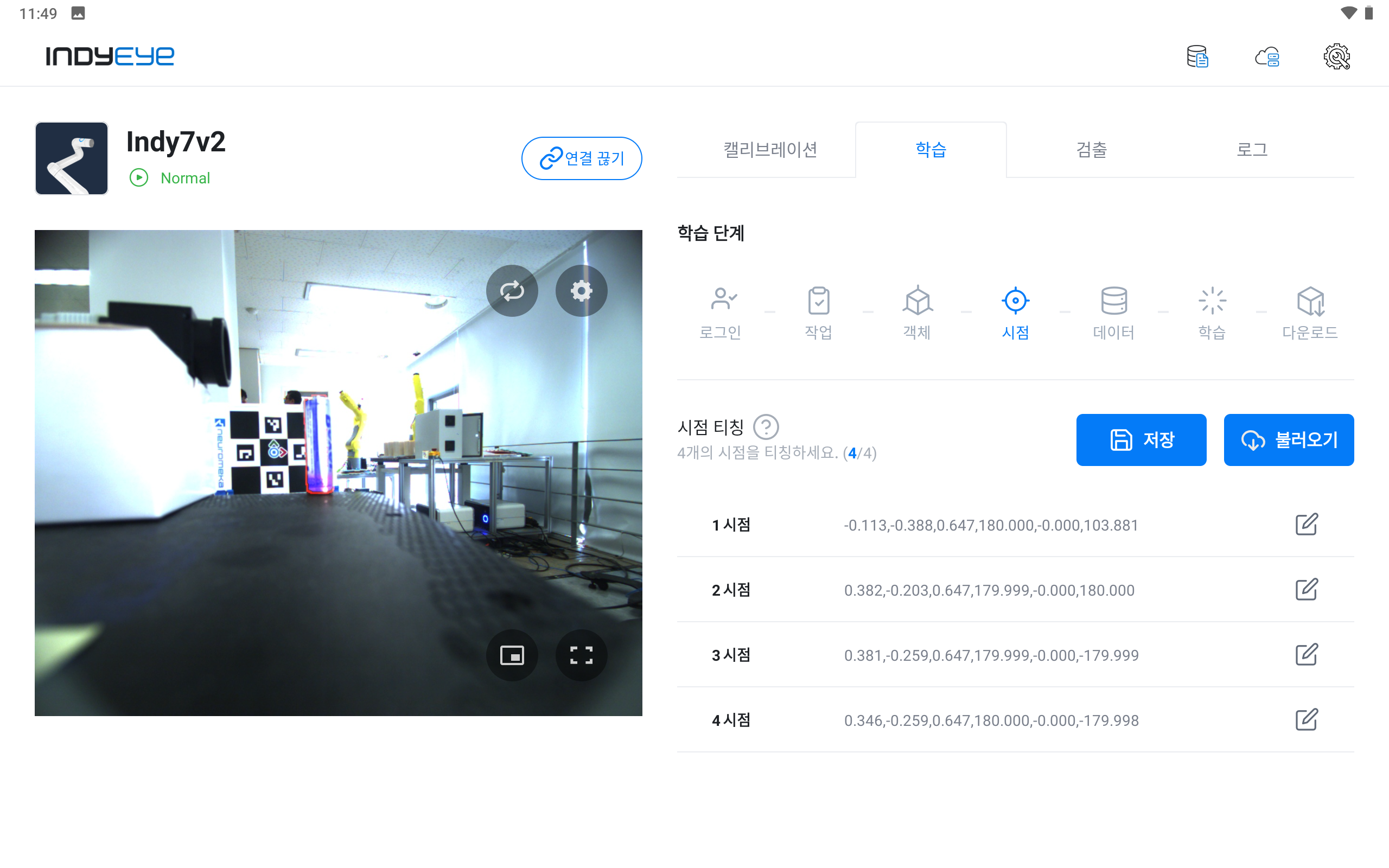
- 앱: 로봇 시점 설정
- 학습데이터를 촬영할 시점 범위 설정
- ※ 시점 이동 후 CAD 모델과 실제 물체가 겹쳐지지 않는다면 다시 객체 탭으로 돌아가서 맞을때까지 조정합니다.
- 앱: 학습데이터 생성
- 데이터 탭으로 이동 후 시작 버튼 터치
- 로봇이 자동으로 움직이며 작업물의 사진을 촬영하고 데이터를 저장합니다.
- ※ 만약 화면상의 CAD 렌더링이 맞지 않는다면 정지 버튼을 눌러 학습데이터 생성을 멈춥니다.
딥러닝 알고리즘 사용
학습 및 학습된 모델의 다운로드
Note
IndyEye 0.6.1 버전 기준, 별도형 IndyEye를 사용하실 경우 pretrained model 1종을 제공하고 있습니다.
커스텀 모델 학습은 뉴로메카에서 직접 서비스 하는 경우에만 제공됩니다.
물체 감지
모델 다운로드가 완료되었다면 DetectObject 모듈에서 해당 모델을 선택할 수 있게 됩니다.
Note
DetectObject 모듈은 한번에 1개만 사용할 수 있습니다.
- 검출 탭으로 이동합니다.
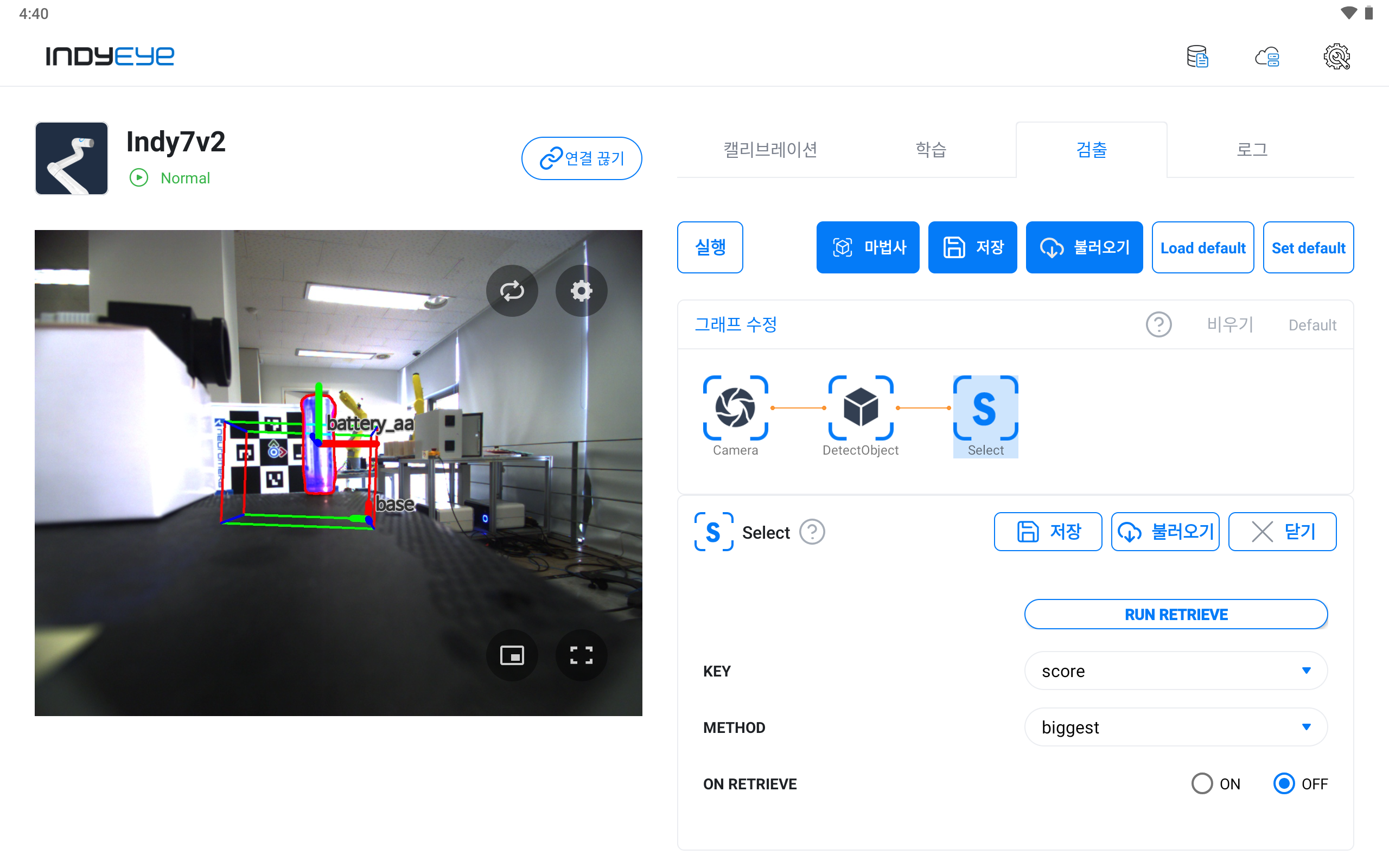
- 그래프에 DetectObject 모듈을 추가하여 MODEL 변수를 사용하고자 하는 모델로 선택합니다.
- 모델이 불러와지기를 기다린 뒤, 실행 버튼을 누르면 모델 인식 결과를 확인할 수 있습니다.
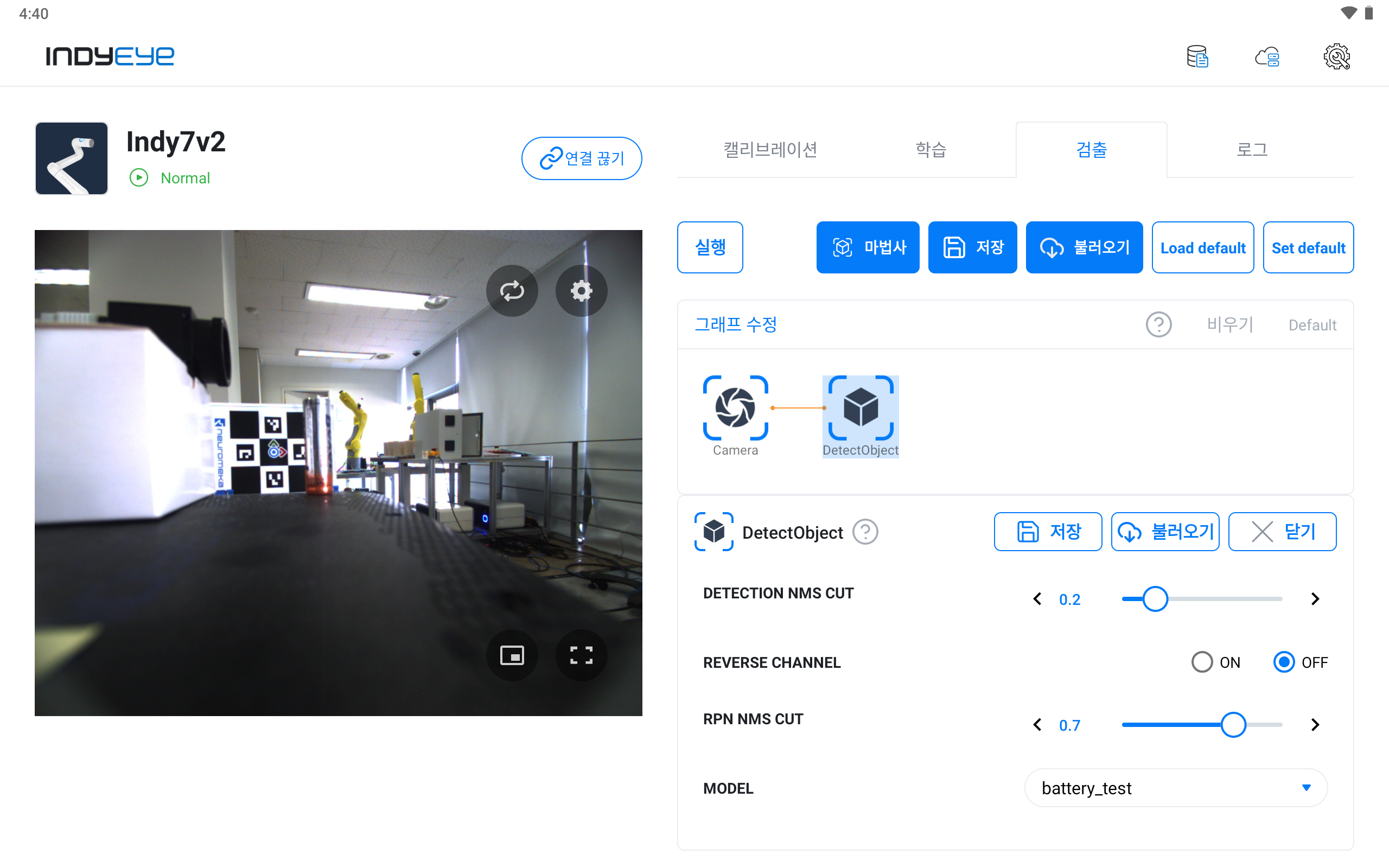
DetectObject 모듈
| 옵션 | 값 | 설명 |
|---|---|---|
| 'CONFIDENCE_CUT' | float, 0.0 ~ 1.0 | 감지 신뢰도의 하한선입니다. 이 값보다 신뢰도가 높은 감지 결과만 유효한 것으로 간주합니다. |
| 'DETECTION_NMS_CUT' | float, 0.0 ~ 1.0 | 설정값보다 많이 겹치는 감지 결과는 신뢰도가 높은 것 하나만을 선택합니다. |
| 'REVERSE_CHANNEL' | bool | 이미지 채널 순서 반전 여부입니다. 선택하면 RGB 채널을 뒤집어 감지합니다. |
| 'RPN_NMS_CUT' | float, 0.0 ~ 1.0 | 감지 시도할 영역의 겹침 정도에 대한 상한선입니다. 작을 수록 서로 겹치는 다양한 영역에 대해 감지를 시도합니다. |
| 'MODEL' | string | 사용할 모델의 이름입니다. |
