Conty 설치 및 소개
Conty (콘티)는 뉴로메카 로봇 전용 티치펜던트 안드로이드 앱 입니다.
사용자 매뉴얼
하드커버 매뉴얼 또는 PDF 형태의 사용자 매뉴얼은 로봇 구매 시 제공되며, 매뉴얼을 제공받지 못하거나 분실한 고객은 아래 메일을 통해 요청해주시기 바랍니다.
사용자매뉴얼
Conty v2.x 버전에서 Conty v3.2.0로의 업데이트
로봇 출하일자에 따라 설치된 소프트웨어 버전이 다를 수 있습니다. 소프트웨어 버전(Indy Framework 및 Conty)이 2.x인 고객의 경우 아래 기술지원 창구에 요청하셔서 원격으로 소프트웨어 업데이트를 진행해주시기 바랍니다.
Conty를 이용한 SW 업데이트 방법
Conty3.x 버전이 이미 설치된 버전일 경우 Conty를 이용하여 소프트웨어 업데이트가 가능합니다. Conty를 통해 로봇에 접속 후 상단에 위치한 '시스템' 탭에서 좌측 하단의 유지보수-시스템 업데이트 를 클릭하면 아래와 같이 로그인 화면이 나타납니다.
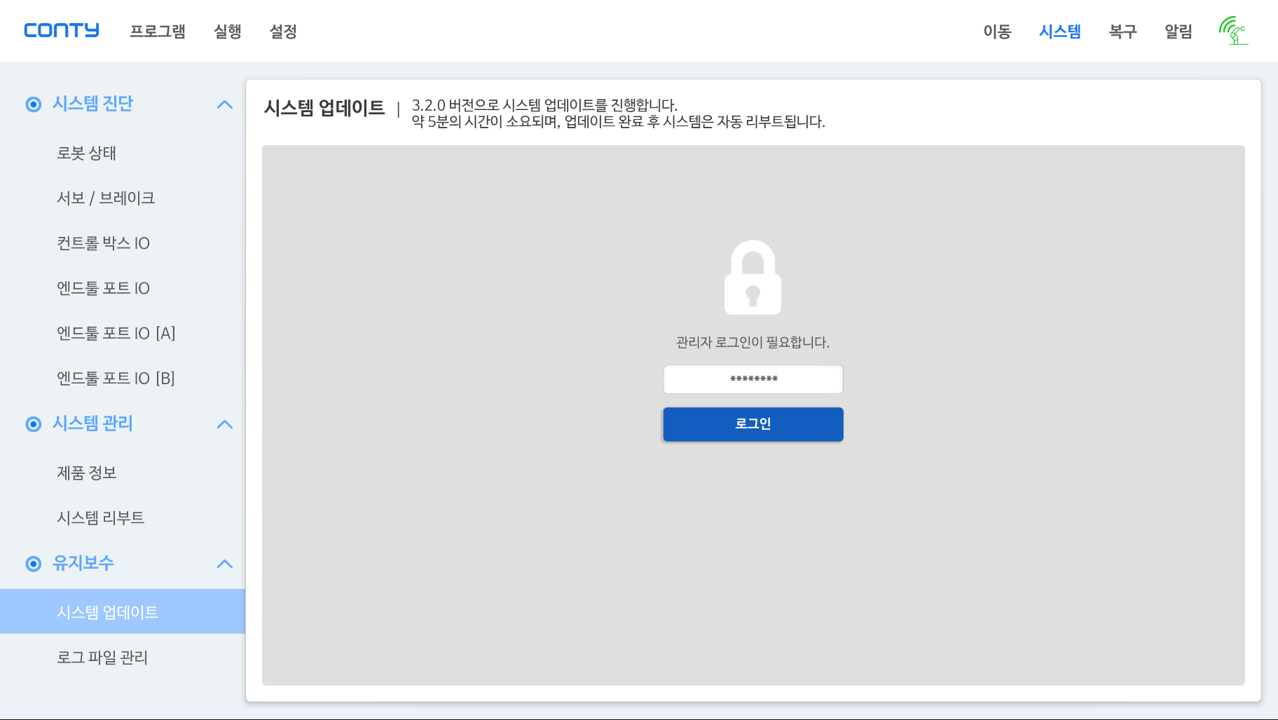
비밀번호 입력
관리자 비밀번호 입력 후 로그인 버튼을 누르면, 시스템 업데이트 화면이 나타나며 우측 하단의 시스템 업데이트 시작 버튼을 누른 후 기다려주시면 소프트웨어 업데이트가 업데이트가 완료됩니다.
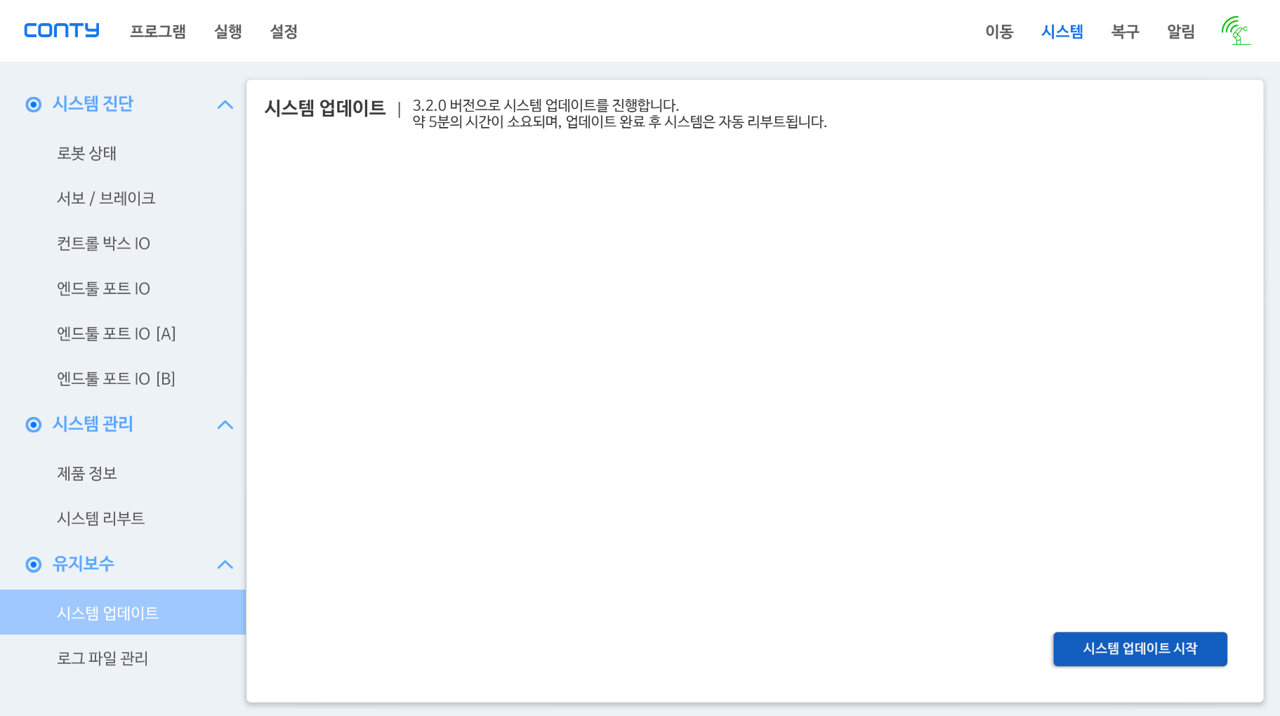
시스템 업데이트
Note
Conty 설치에 필요한 APK 파일은 technical-support@neuromeka.com을 통해 요청 시 회신드립니다 (로봇 구매 고객에게만 제공).
Conty 주요 기능
모션 기능
Conty 상에서는 다양한 로봇의 모션 생성을 위한 Move 기능을 제공합니다.
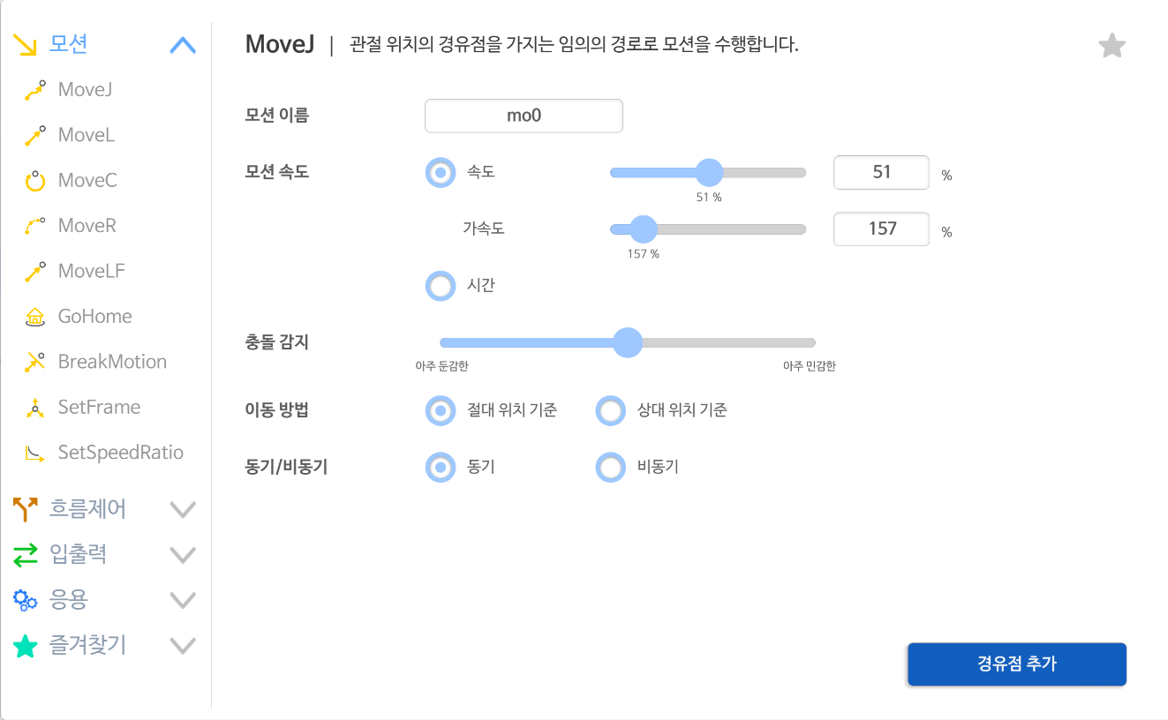
Conty의 다양한 Move 기능
각 Move 커맨드는 속도/가속도 설정 또는 시간 설정을 통해 로봇 모션의 속도를 조절할 수 있으며, 충돌감지 감도를 조절할 수 있습니다.
MoveJ
관절공간에서의 모션을 생성할 수 있습니다.
MoveL
작업공간에서의 모션을 생성할 수 있습니다.
MoveC
작업공간에서의 원 모양의 모션을 생성할 수 있습니다.
MoveLF
작업공간에서의 힘 제어 모션을 생성할 수 있습니다. 샌딩 작업과 같이 z 축 방향으로 일정한 힘을 유지하면서 x, y 축 방향으로 모션을 수행하는 경우 이를 이용하여 모션을 구현할 수 있습니다 (참고영상).
MoveR
텔레오퍼레이션을 통해 녹화 (Recording)된 기능을 재생 (Reply)할 수 있는 기능을 제공합니다. 텔레오퍼레이션은 뉴로메카의 전용 핸드헬드 교시 디바이스를 통해 수행할 수 있습니다 (참고영상)
비동기 모션
비동기 모션은 로봇이 Move 명령을 수행하는 중 트리거에 의해 추가적인 모션을 중첩하거나 갈아탈 수 있게 하는 기능입니다. 비동기 모션 기능을 통해 다양하고 복잡한 모션 (예를들어 용접의 위빙모션)을 만들어 낼 수 있습니다.
프로그래밍 기능
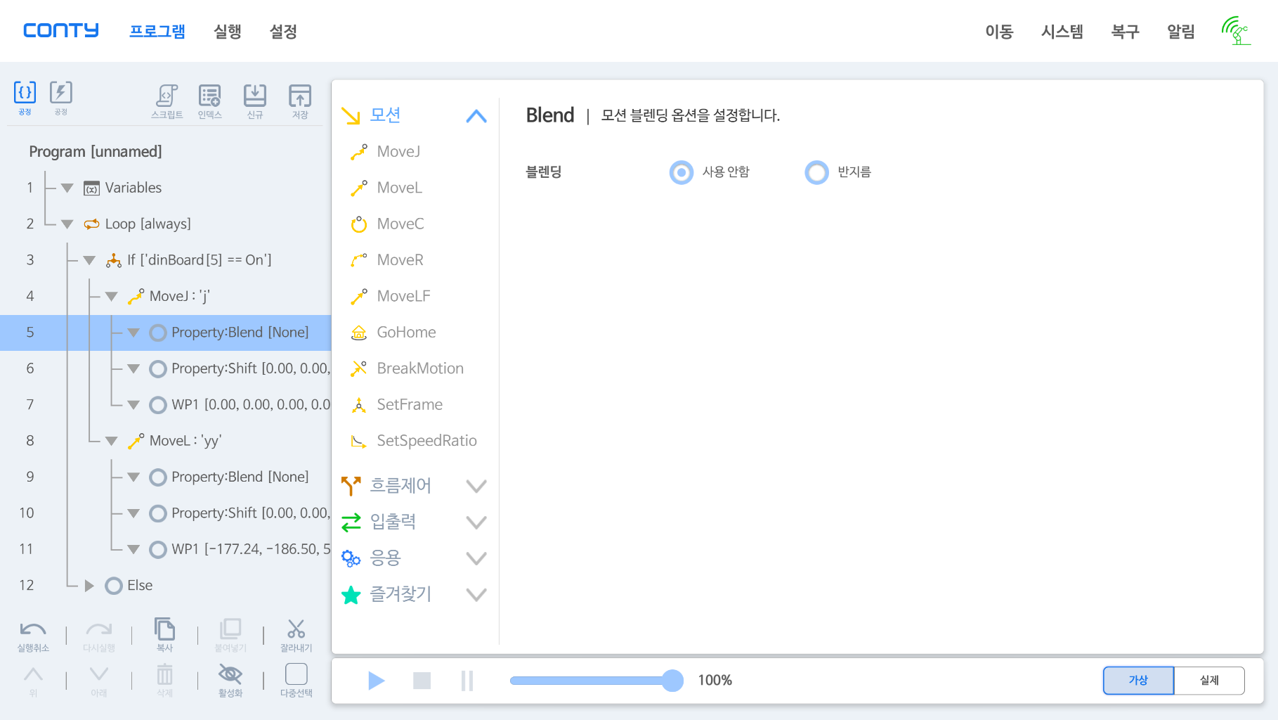
Conty의 프로그래밍 기능
콘티를 통해 그래픽 유저 인터페이스 기반으로 비전문가도 쉽게 로봇 프로그래밍을 수행할 수 있습니다. 앞서 기술한 다양한 모션에 대해서 직접교시, 조그 등을 통해 티칭이 가능합니다. 또한 흐름제어 커맨드 (조건문, 반복문 등)를 통해 로봇의 구동 로직을 구현할 수 있습니다. 또한 입출력장치의 제어, PLC 및 PC와 같은 외부장치와의 연동, 내부 변수 기능을 통해 보다 쉽게 시스템 통합을 수행할 수 있습니다.
통신 기능
모드버스 기능
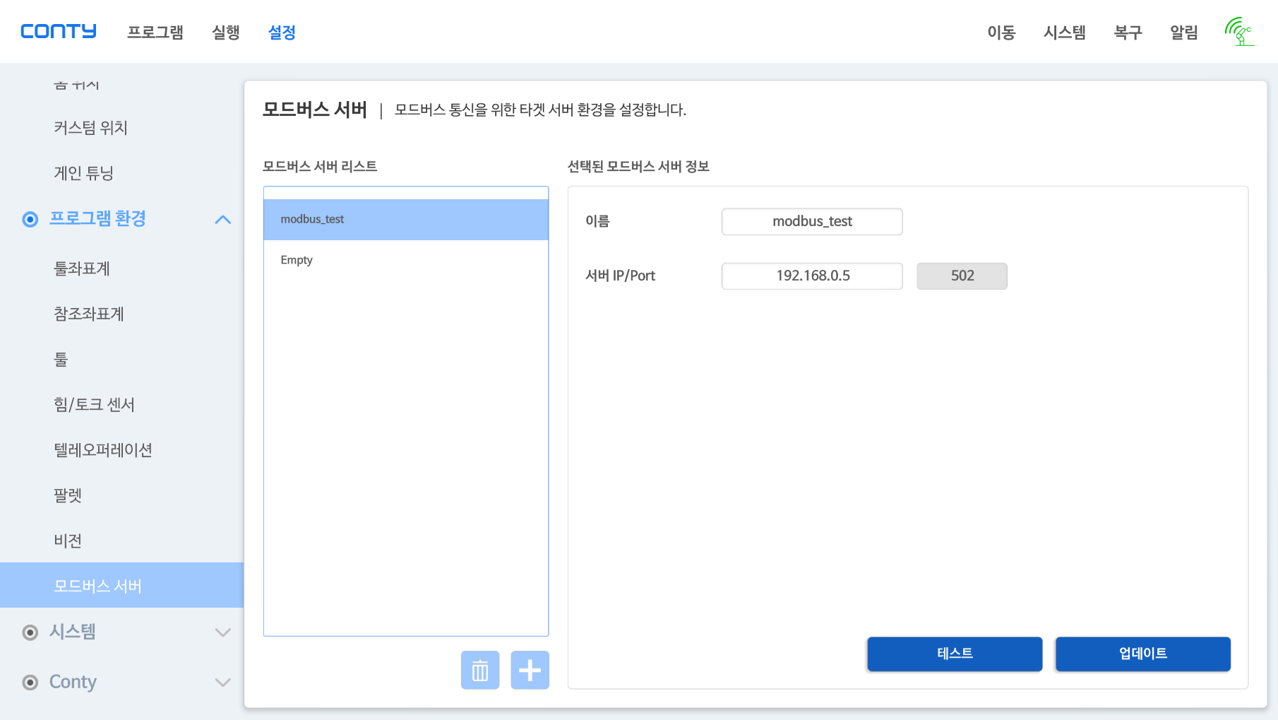
Conty의 모드버스 서버 기능
콘티를 통해 로봇에서 제공하는 모드버스 서버를 사용할 수 있을 뿐만이 아니라, 외부 장치 (PLC)의 모드버스 서버에 클라이언트로 접근할 수 있습니다.
입출력 기능
I/O보드 입출력
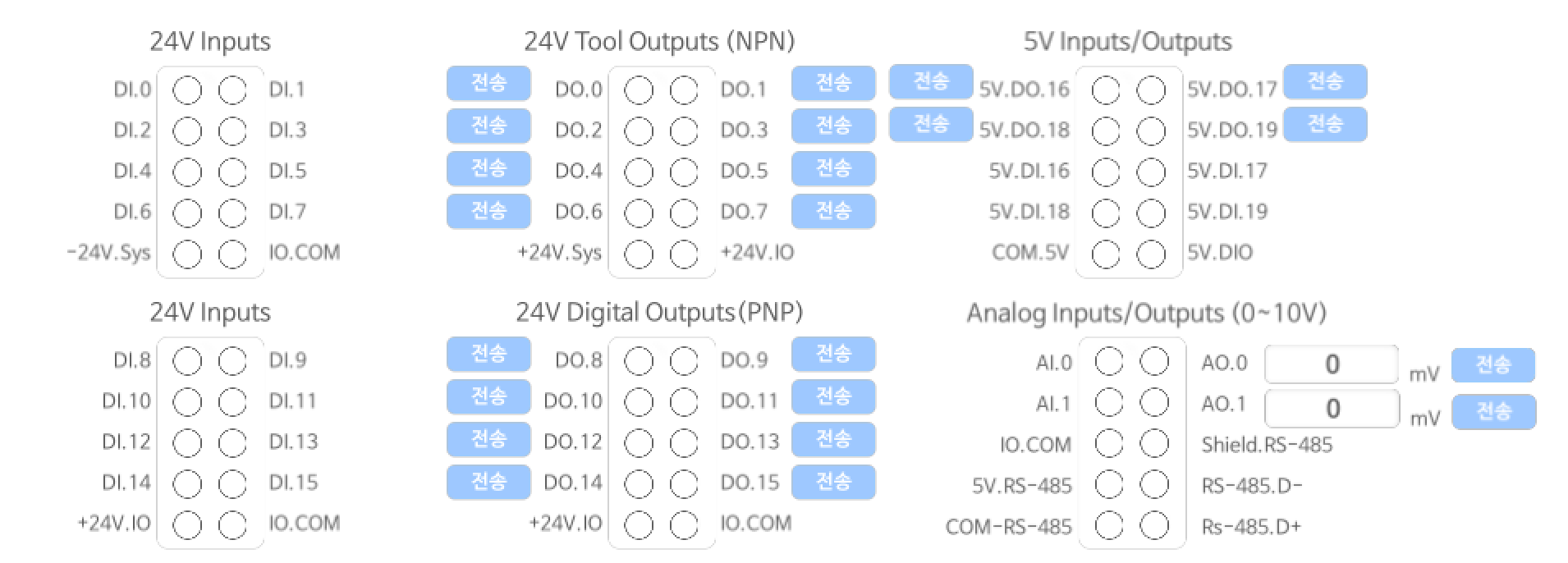
Conty의 "RevC" 버전 I/O 보드 입출력 기능
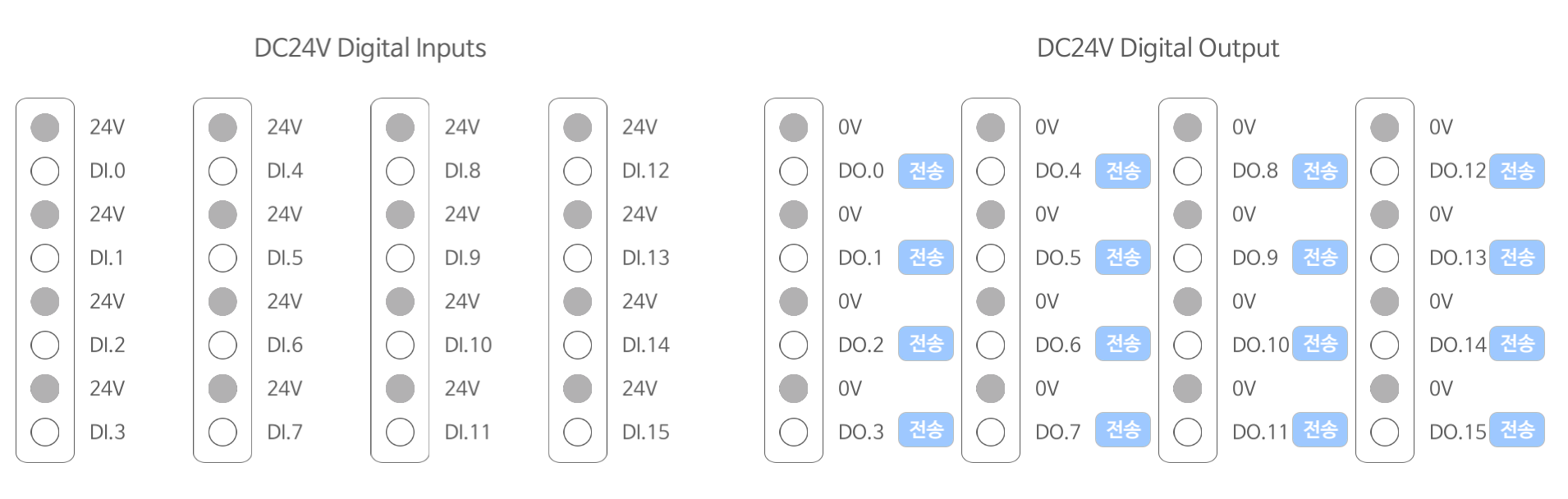
Conty의 "RevE" 버전 I/O 보드 입출력 기능
로봇 컨트롤박스에 장착된 I/O보드의 디지털 및 아날로그 입출력을 제어할 수 있습니다.
앤드툴 입출력
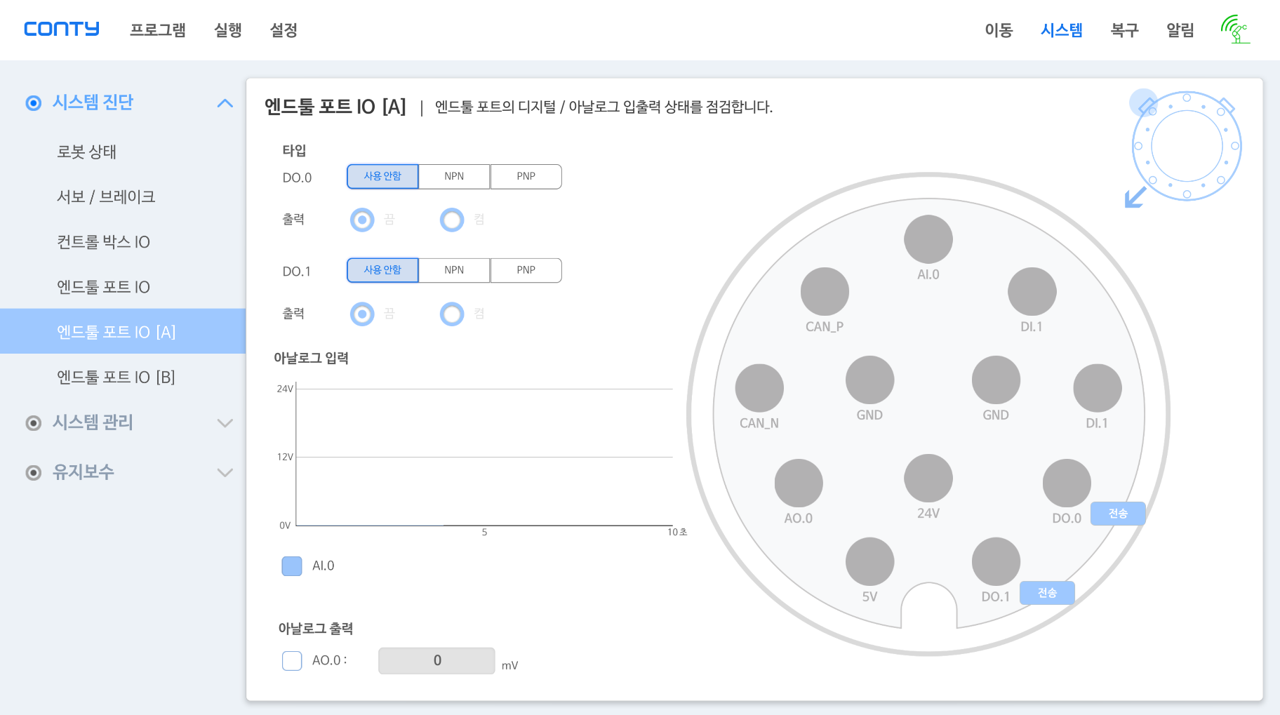
Conty의 앤드툴 보드 입출력 기능
로봇 말단에 부착된 앤드툴 포트의 입출력을 제어할 수 있습니다.
