TwinCAT 설치
서론
- 이 문서는 뉴로메카 CORE 모듈을 제어하기 위해 TwinCAT 프로젝트를 설정하는 방법을 안내합니다. This document guides you how to setting up a TwinCAT project to control Neuromeka CORE module. 이 설명을 따라오기 전에, 윈도우 7 이상의 버전과 Ethernet port가 있는 PC나 노트북을 준비하세요.
- PC/노트북과 CORE의 연결은 아래 그림과 같습니다.
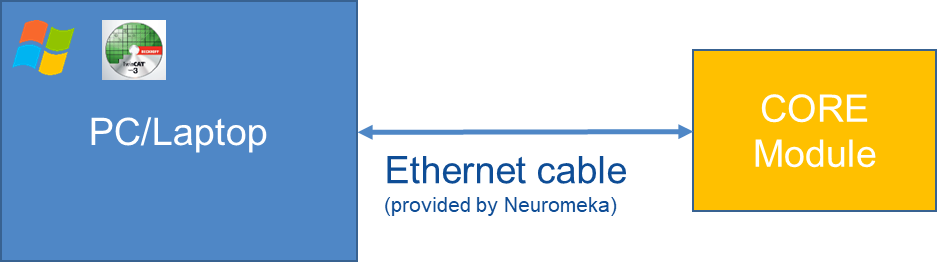 Figure 1. CORE 모듈 - EtherCAT 연결
Figure 1. CORE 모듈 - EtherCAT 연결
TwinCAT3을 위한 준비
필요 조건
-
Microsoft Visual Studio 2010 (with Service Pack 1), 2012, 2013, 2015 or 2017 Professional, Premium or Ultimate Visual Studio 2015를 설치할 때, the Visual C++ development option은 자동 설치에서 선택되지 않으므로 직접 선택하여 설치해야 합니다.
 Figure 2. Visual C++ Development Option 선택
Figure 2. Visual C++ Development Option 선택
-
Microsoft Windows Driver Kit 7 (WDK): Installing Windows Driver Kit
-
TwinCAT 3 설치 (XAE engineering)
주의:
TwinCAT (TC) 3.0은 32비트 운영 체제를 타켓 플랫폼(runtime PC)으로만 지원합니다.
- TC 3.0은 프로젝트 개발을 위해 x64 PC에서 engineering platform으로 사용할 수 있습니다.
- 프로그램을 실행하기 위해 네트워크를 통해 32비트(x86) 원격 PC로 전송할 수 있습니다.
TC 3.1은 32비트 운영 체제를 타켓 플랫폼(runtime PC)으로만 지원합니다. 하지만, 실행을 위해 아래 문서처럼 서명이 필요합니다.
타겟 runtime은 "Windows NT Kernel"을 기반으로 해야합니다.
- 예) Windows XP, Windows 7, Windows XP Embedded, Windows Embedded Standard 2009, Windows Embedded Standard 7, etc.
x64: 드라이버 서명
- 윈도우 명령 프롬프트를 관리자 권한으로 엽니다.
- 시작 ⇨ 명령 프롬프트 오른쪽 클릭 후 관리자 권한으로 실행
- 명령 프롬프트에서, %WINDDK7%\bin\x86\ 에 들어갑니다.
- 명령을 실행합니다. makecert -r -pe -ss PrivateCertStore -n CN=MyTestSigningCertMyTestSigningCert.cer
- 이어서 "MyTestSigningCert.cer" 파일과 윈도우 인증서 저장소에 저장된 자체 서명 인증서를 생성하세요.
- 결과는 mmc로 확인할 수 있습니다. ( File ⇨ Add/Remove Snap-in ⇨ Certificates)
 Figure 3. x64 드라이버 인증서 확인
Figure 3. x64 드라이버 인증서 확인
- 시스템 환경 변수를 "TWINCATTESTCERTIFICATE" 에서 "MyTestSigningCert" 로 변경하세요.
- 서명 모드를 활성화 시켜 윈도우가 자체 서명 인증서를 받아들일 수 있도록 하세요.
- 명령 프롬프트에서 실행: bcdedit /set testsigning yes , restart Windows (명령 실행 전에 Bios에서 보안 부트를 사용하지 않도록 설정해야함)
- 만약 서명 모드가 활성화 된 경우, 화면 오른쪽 하단에 이 모드가 표시 되며, PC는 이제 모든 서명된 드라이버를 실행하기 위해 받아들입니다.
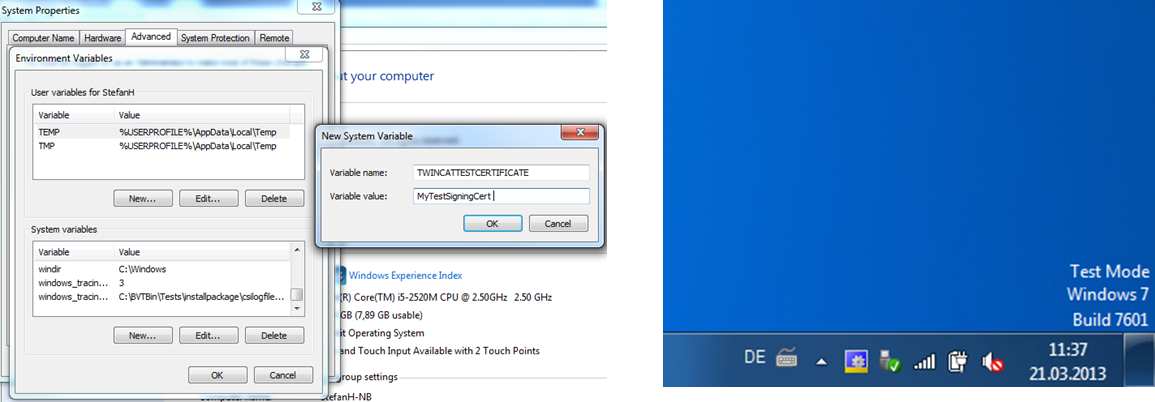 Figure 4. 윈도우 테스트 모드에서 인증서 활성화 시키기
Figure 4. 윈도우 테스트 모드에서 인증서 활성화 시키기
CORE 모듈을 위한 Ethercat XML Device Description (ESI) 파일 추가하기
- CORE module 설명 파일을 TwinCAT 폴더에 복사합니다. (IO 장치를 스캐닝할 때 사용)
- 설명 파일: NRMK Drive.xml
- 위치: < TwinCAT installation path >\3.1\Config\Io\EtherCAT
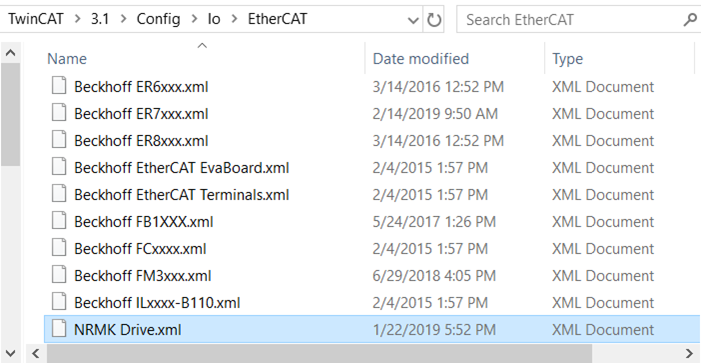 Figure 5. TwinCAT 위치
Figure 5. TwinCAT 위치
설정 요령
TwinCAT에 CPU 코어 할당
- 다른 어플리케이션(VMWare)과의 충돌을 피하기 위해 TWinCAT은 분리된 CPU에서 실행되어야 합니다.
- 이 과정에서 CPU는 최소 2개의 코어를 가져야 합니다.
- 설정은 아래와 같습니다.
- 솔루션 탐색기에서 SYSTEM > Real-time 클릭
- "Read from Target" 클릭하여 사용 가능한 CPU 목록 보기
- “Set on Target” 을 클릭하고 윈도우에 사용할 코어수를 설정
- 나머지 코어는 real-time 태스크에 대해 선택 할 수 있습니다.

Figure 6. TwinCAT3 프로젝트 - Real-time 태스크를 위한 CPU 코어 할당하기
눈금(Tick) 설정하기
- 윈도우 8 이상 버전을 실행할 때 필요
- 관리자 권한으로 명령 프롬프트 열고, 다음 명령을 실행:
%TWINCAT3DIR%\System\win8settick.bat

Figure 7. TwinCAT3 프로젝트 - Real-time Tick 설정
Ethernet 카드를 위한 TwinCAT 드라이버 설치
- TwinCAT > "호환되는 Realtime Ethernet 장치 보기" 클릭
- 예 클릭하여 “Application TcRteInstall”
- “Ethernet Adapters” 창에서, Ethercat에 사용할 Ethernet 카드 클릭
- 드라이버 설정하기(setup driver) 클릭
-
윈도우 창 닫기

Figure 8. TwinCAT3 - EtherCAT을 위한 NIC Driver참고: 또는 솔루션 탐색기에서 I/O -> Devices 아래에서, Device 1 (EtherCAT) 를 더블 클릭 할 수 있다. 그리고, Adapter 탭에서, Compatible Devices... 클릭
Ethercat 마스터에 Ethernet 카드 할당
- 솔루션 탐색기에서 Ethercat 마스터 장치 더블 클릭(“Device 1 (EtherCAT)”)
- Adapter 탭에서, “Search…” 클릭 후 "Ethernet card to use for Ethercat" 선택.
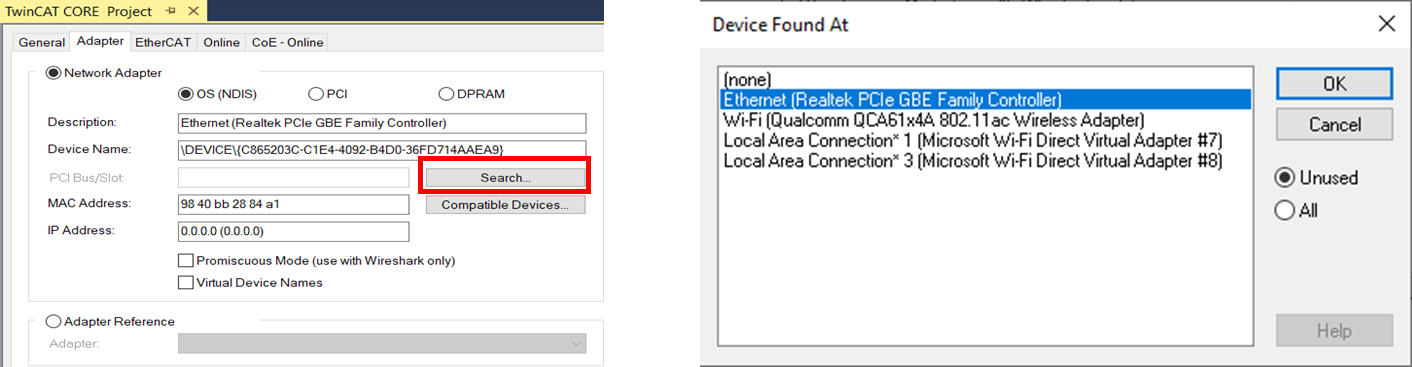
Figure 9. TwinCAT3 - Ethercat 마스터에 NIC 할당하기
솔루션과 프로젝트 대상 재설정(Retargeting)
- 다른 SDK로 개방형 솔루션/프로젝트를 수행할 경우 대상 재설정(retargeting) 필요
- TwinCAT Solution 위 우클릭 후 Retarget solution 클릭
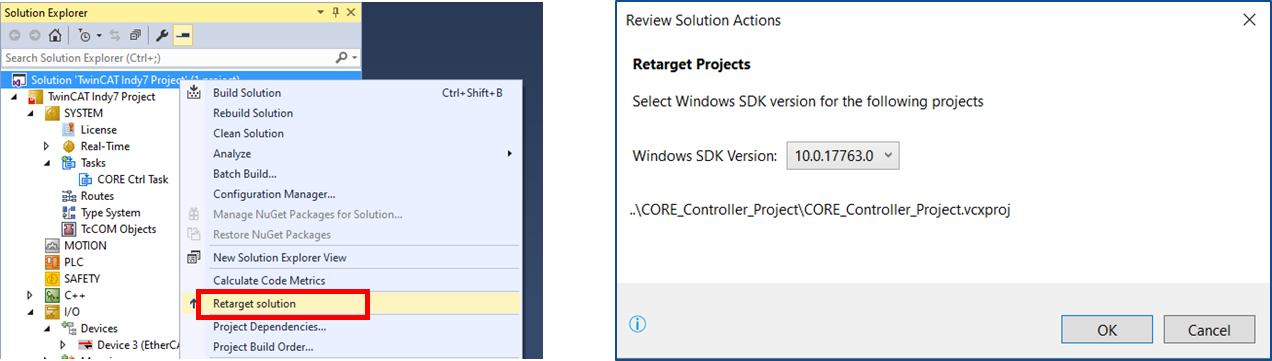
Figure 10. TwinCAT3 - TwinCAT Solution & Project 대상 재설정
