Robot Simulation
This section provides commands for launching the Moby robot model in a simulated environment using the Gazebo simulator. This can be useful for testing and developing robotic applications without the need for a physical robot.
Package Configuration
This section uses packages: moby_gazebo, moby_mapping and moby_navigation. The moby_gazebo package contains a description for a simulation robot, The moby_mapping contains mapping configuration to use with simulation robots. The moby_navigation contains navigation configuration to use with simulation robots.
Launch
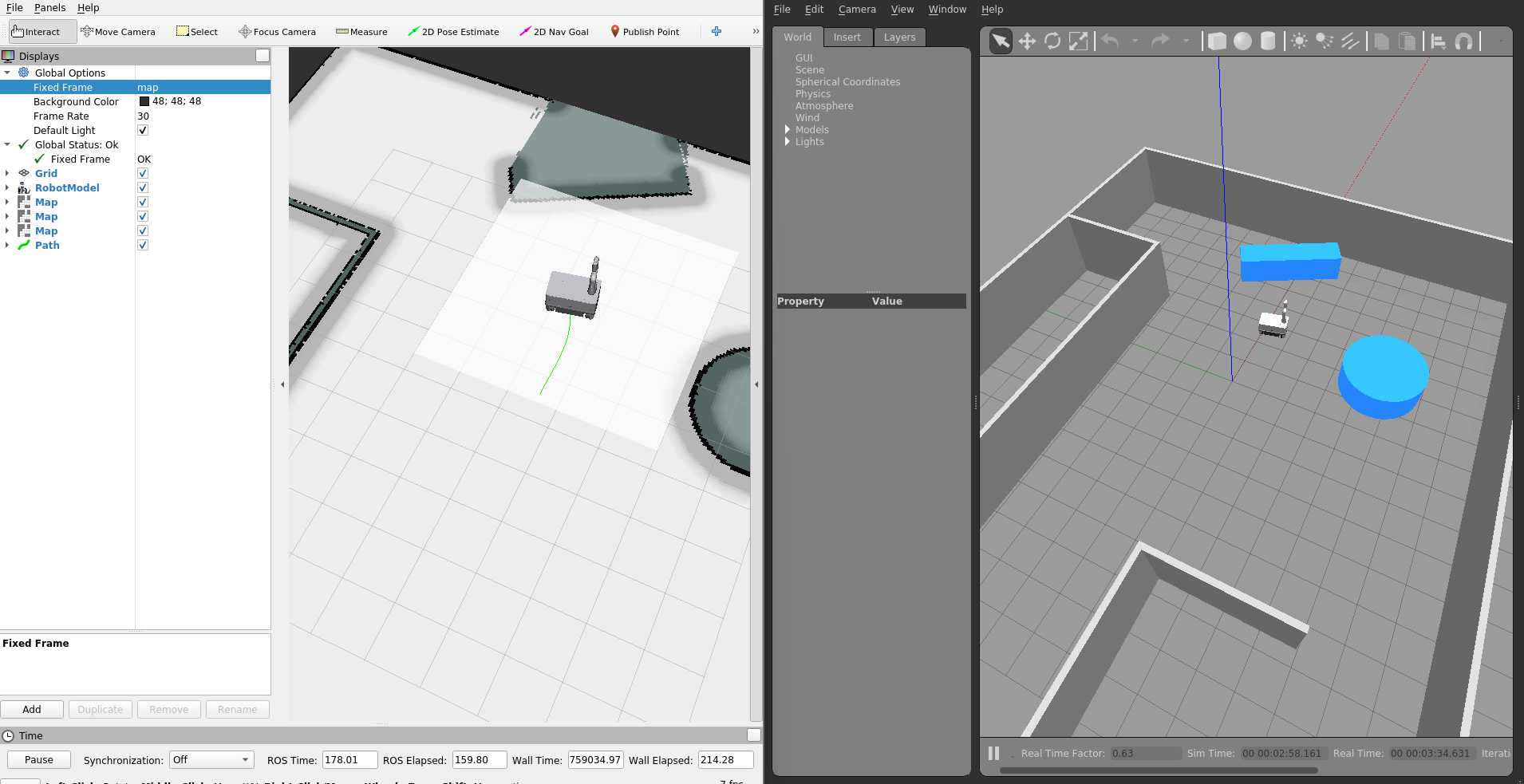
Run the Gazebo simulator with the Moby robot model loaded using the command below.
When you run the command, the Gazebo window and the Rviz window will be launched as shown below.
To Start Mapping
To use the mapping with the Gazebo simulator, run following commands:
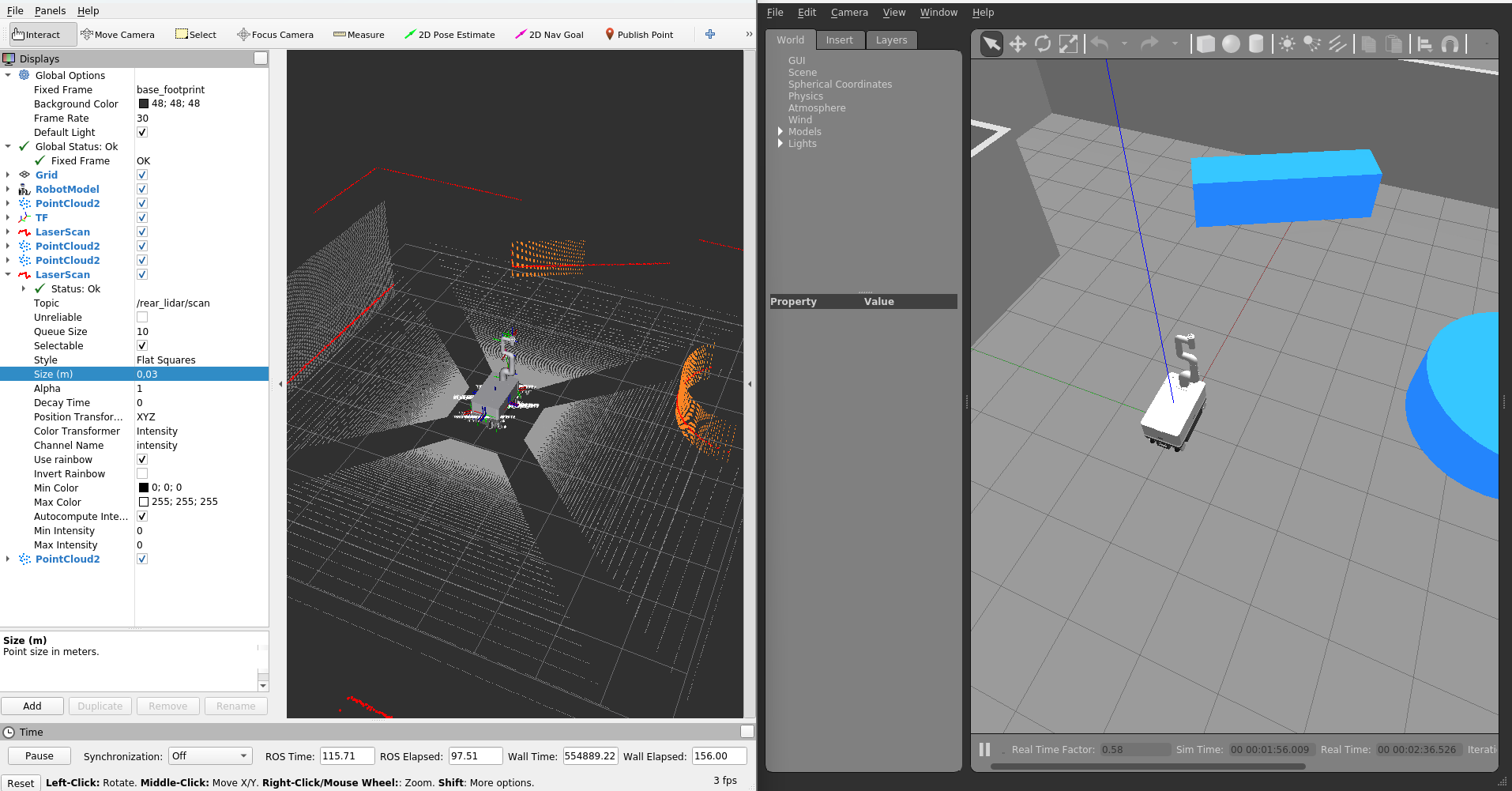
- Slam toolbox
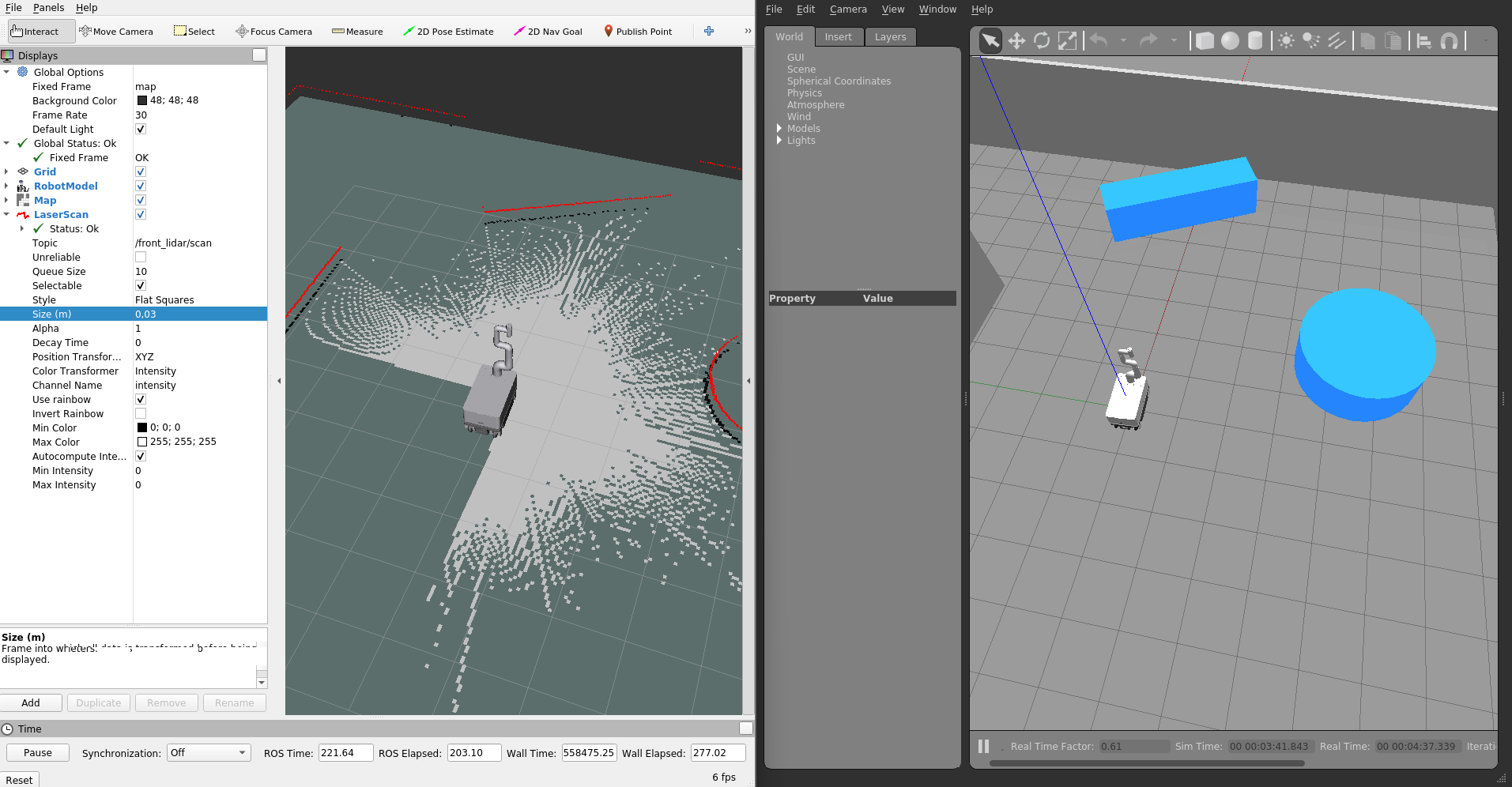
- Rtabmap
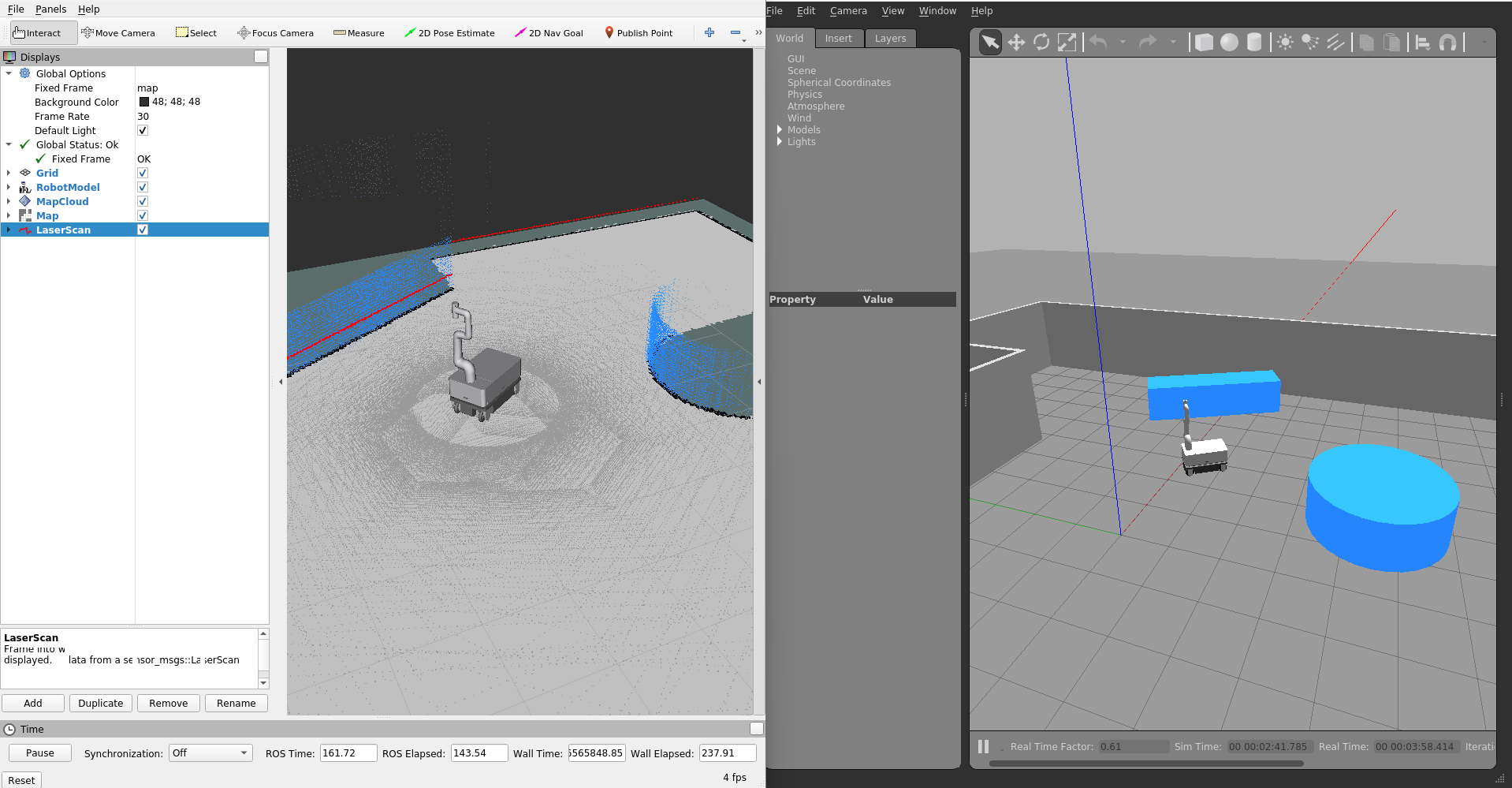
To Start Navigation
To use the navigation with the Gazebo simulator, start the gazebo robot and run following command: