Conty
Conty Installation and Introduction
Conty is a teach pendant Android app exclusively for Neuromeka robots.
User Manual
A hardcover manual or a PDF version of the user manual is provided at the time of robot purchase. Customers who did not receive a manual or have lost it can request one via the email below.
User
Updating from Conty v2.x to Conty v3.2.0
Depending on the shipping date of the robot, the installed software version may vary. Customers with the software version (Indy Framework and Conty) at 2.x should request a remote software update through the technical support contact below.
How to Update Software Using Conty
If you have already installed Conty version 3.x, software updates can be performed using Conty. After connecting to the robot through Conty, click on the 'System' tab located at the top and then click on Maintenance - System Update on the bottom left, a login screen will appear as shown below.
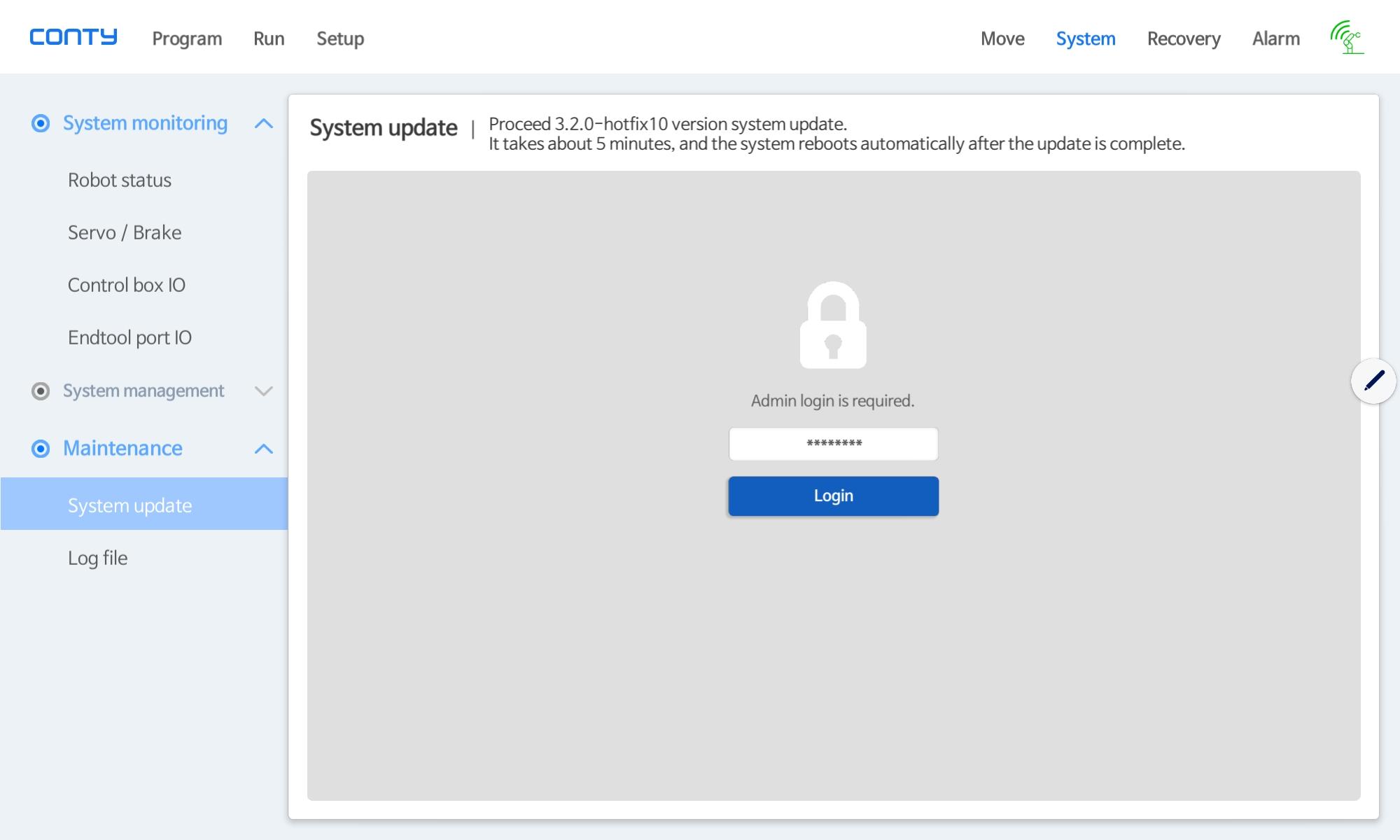
Enter Password
After entering the admin password and pressing the login button, the system update screen will appear, and pressing the Start System Update button on the bottom right and waiting will complete the software update.
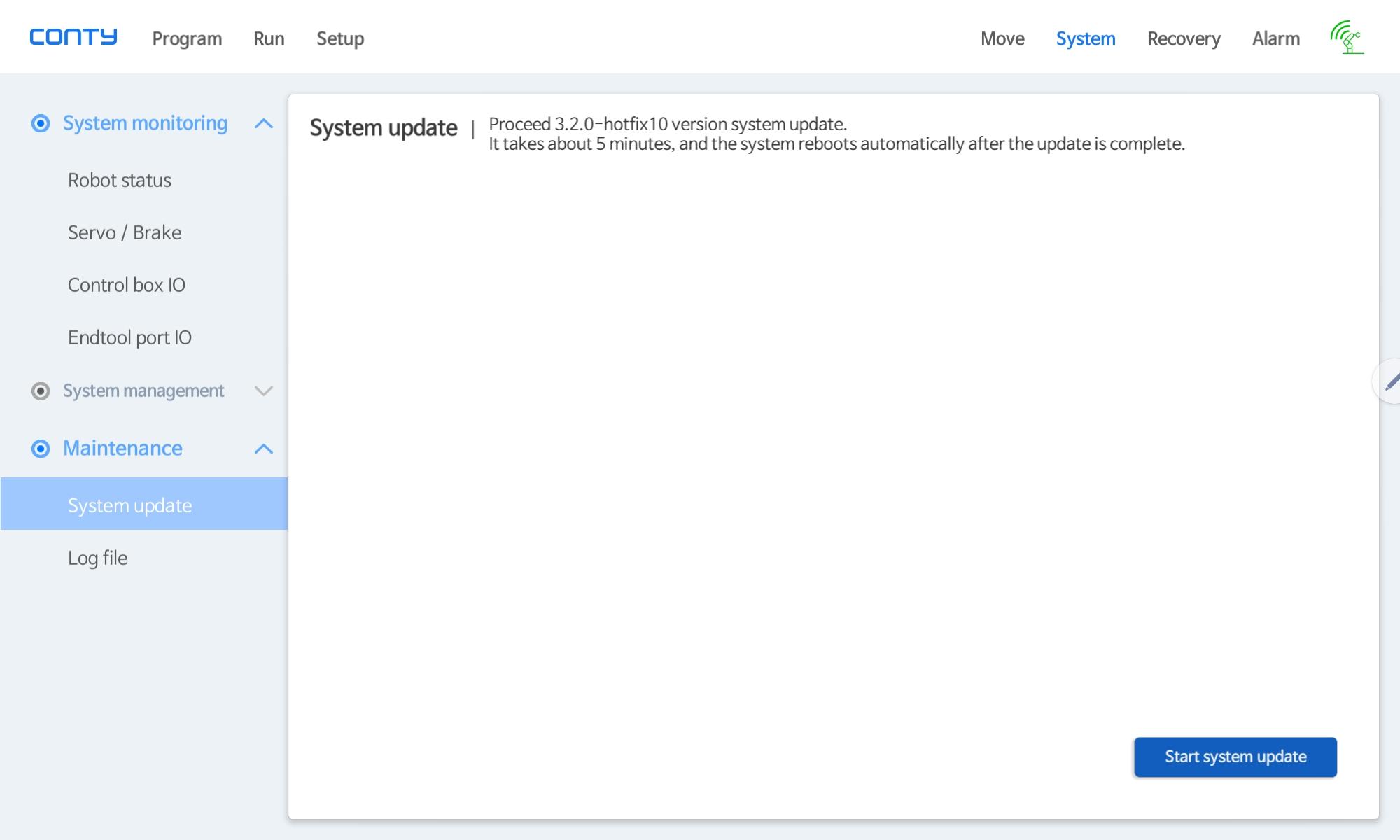
System Update
Note
The APK file needed for Conty installation will be provided upon request via technical-support@neuromeka.com (only available to robot purchasers).
Main Features of Conty
Motion Function
Conty provides Move functions for creating various robot motions.
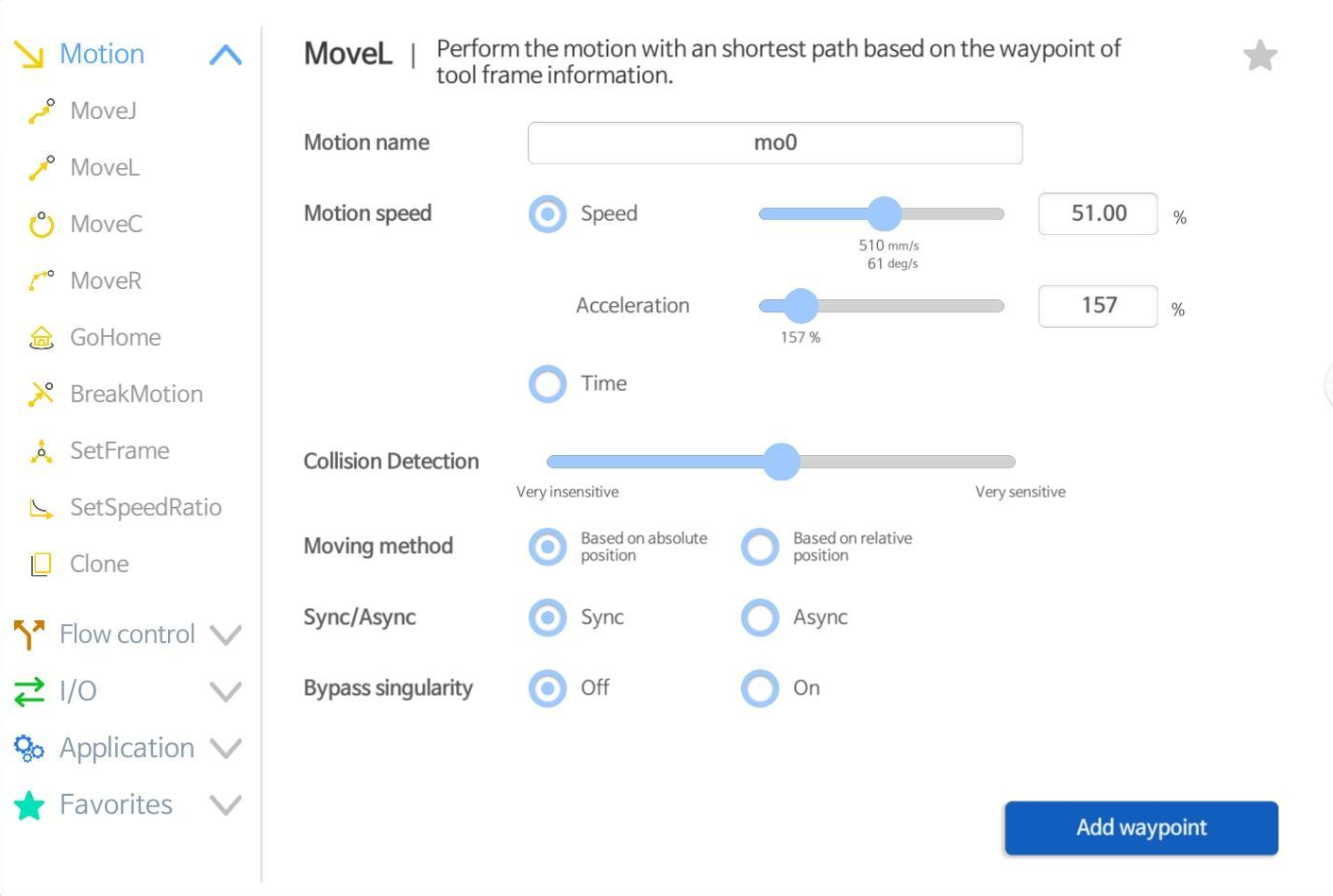
Various Move functions in Conty
Each Move command allows you to adjust the speed of robot motion through speed/acceleration settings or time settings, and you can adjust collision detection sensitivity.
MoveJ
You can create motion in joint space.
MoveL
You can create motion in task space.
MoveC
You can create circular motion in task space.
MoveLF
You can create force-controlled motion in task space. For tasks like sanding that maintain constant force in the z-axis direction while moving in the x, y-axis directions, this function can be used to implement motion (reference video).
MoveR
You can replay functions recorded through teleoperation. Teleoperation can be performed using Neuromeka's exclusive handheld teaching device (reference video).
Asynchronous Motion
Asynchronous motion allows for overlaying or switching to additional motions triggered while a Move command is being executed. The asynchronous motion feature enables the creation of complex motions (e.g., weaving motion in welding).
Programming Function
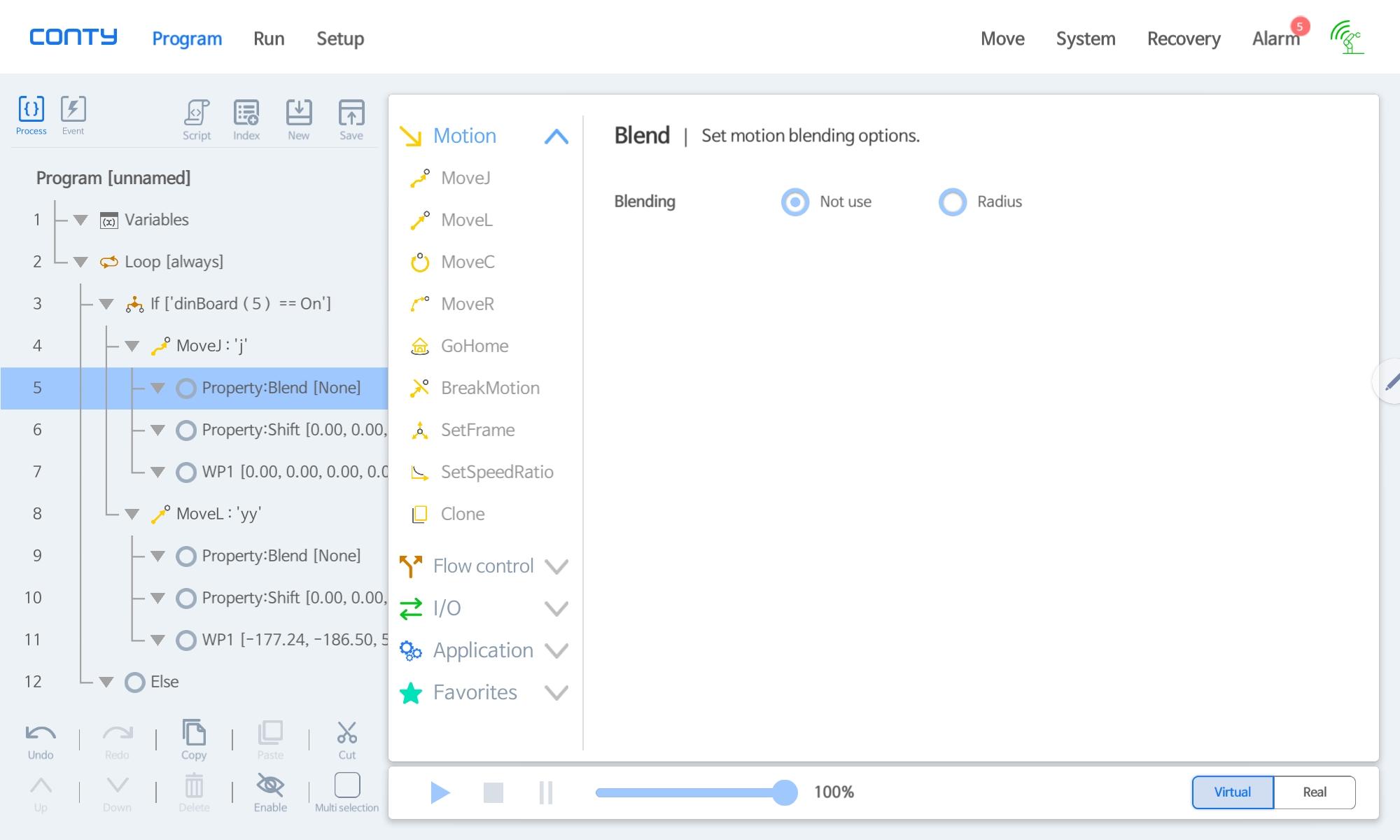
Programming features in Conty
Conty allows even non-experts to easily perform robot programming through a graphical user interface. The various motions mentioned earlier can be taught through direct teaching, jogging, etc. Flow control commands (conditional statements, loops, etc.) can be used to implement the robot's operational logic. Additionally, control of input/output devices, integration with external devices like PLCs and PCs, and internal variable functions make system integration easier.
Communication Function
Modbus Function
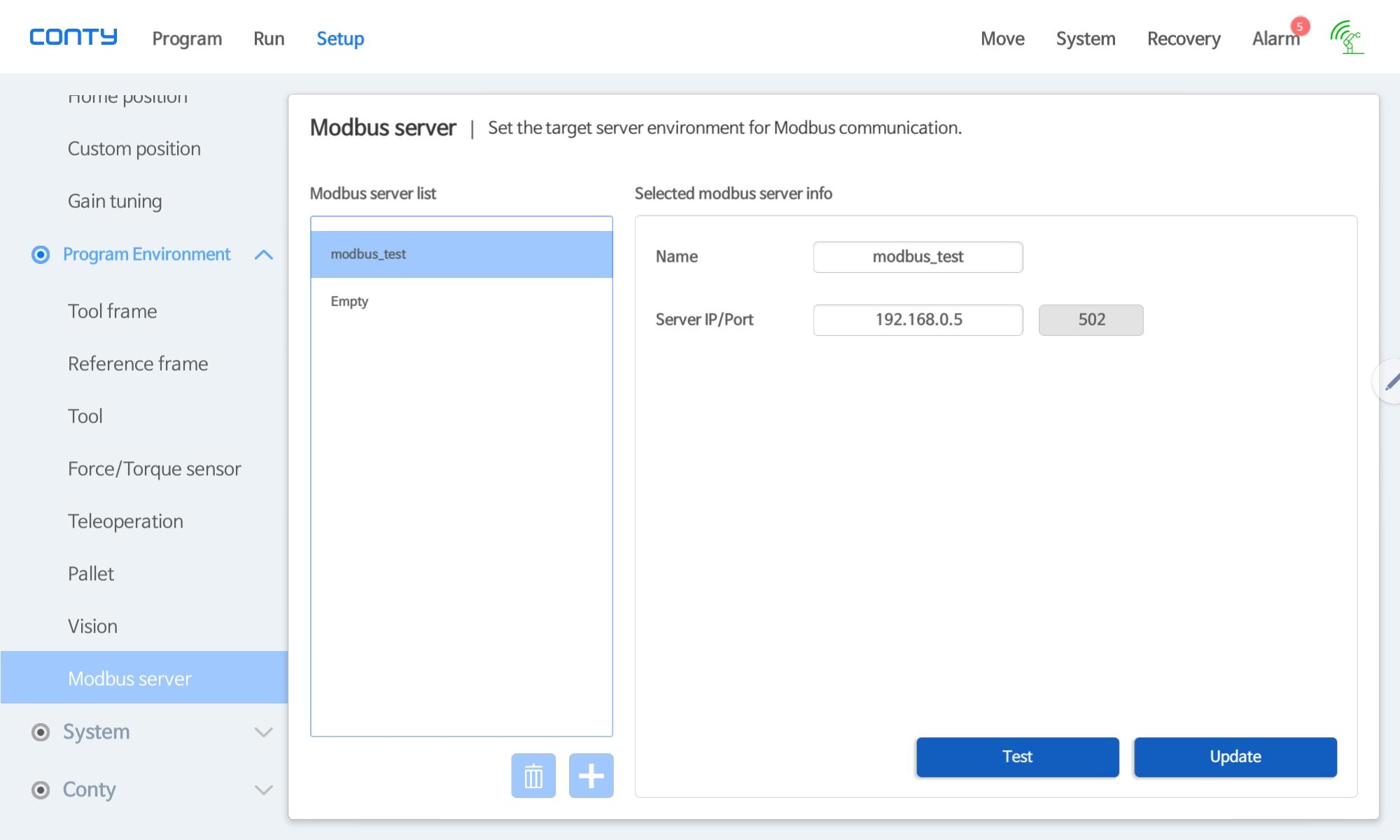
Modbus server function in Conty
Conty allows you to use the Modbus server provided by the robot, as well as access the Modbus server of external devices (PLC) as a client.
Input/Output Function
I/O Board Input/Output
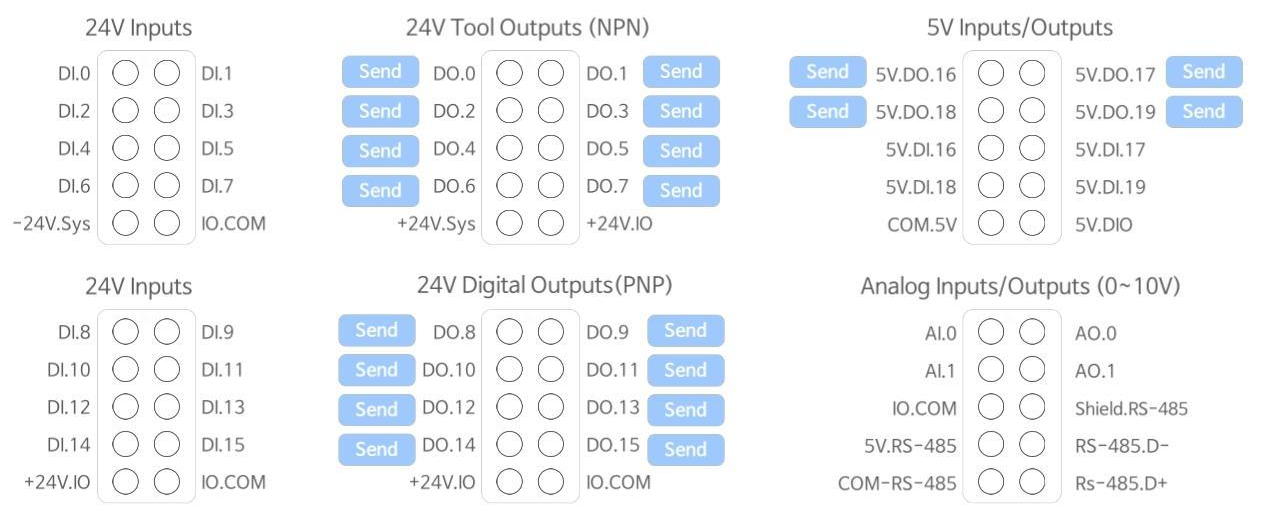
"RevC" Version I/O board input/output function in Conty
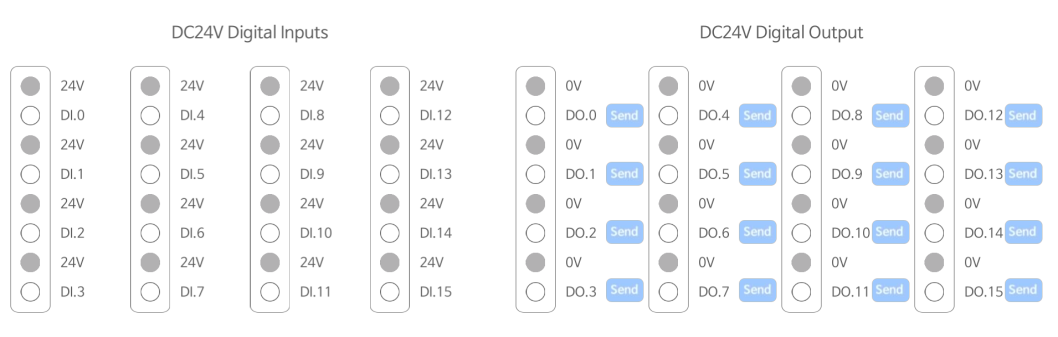
"RevE" Version I/O board input/output function in Conty
You can control the digital and analog inputs/outputs of the I/O board mounted on the robot control box.
End-Tool Input/Output
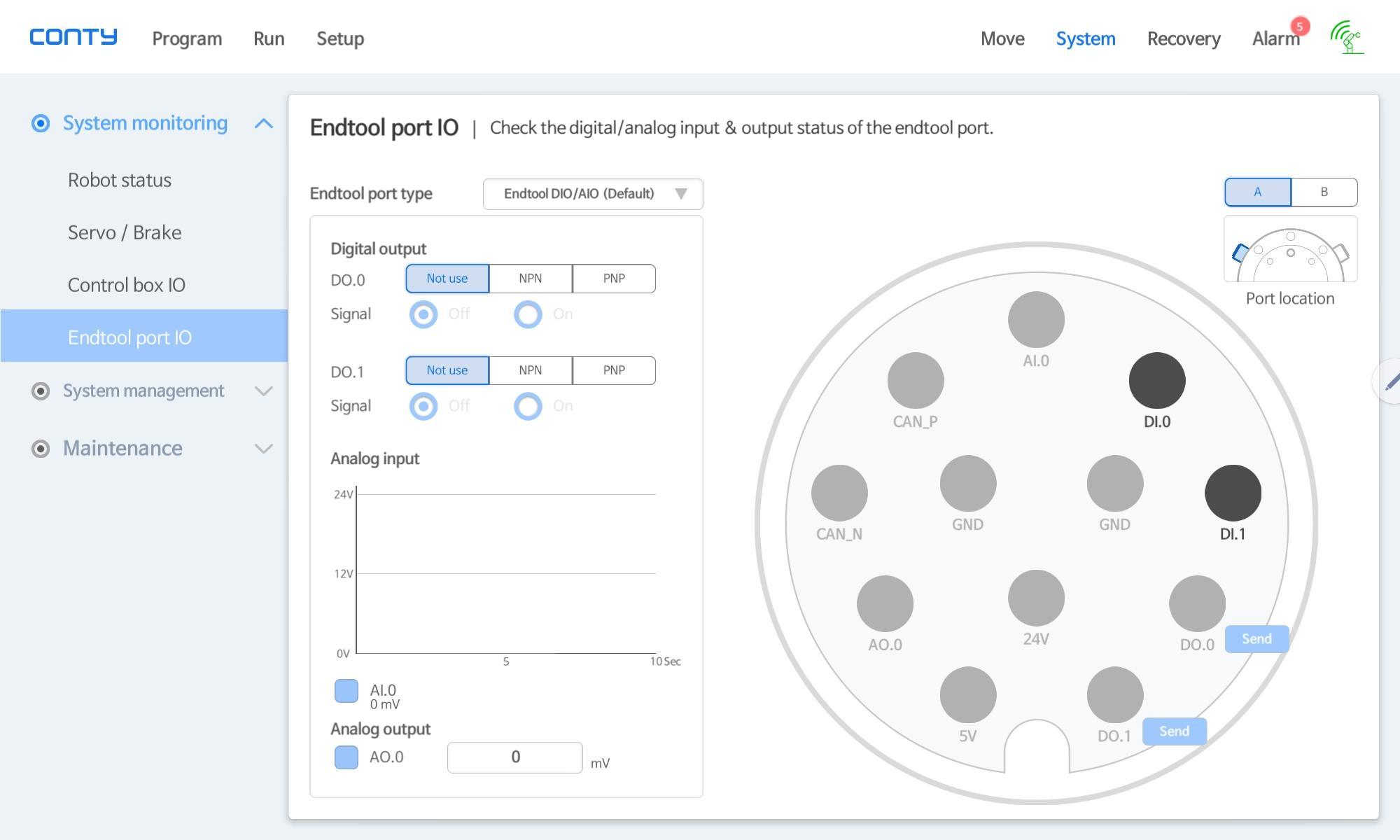
End-tool board input/output function in Conty
You can control the inputs/outputs of the end-tool port attached to the end of the robot.
