실제 로봇 제어
"실제 로봇 제어" 섹션에서는 실제 Indy 로봇과 함께 ROS 소프트웨어를 실행하기 위한 명령을 제공합니다. 이는 실제 로봇에서 애플리케이션을 테스트하고 실행하는 데 유용할 수 있습니다.
패키지 구성
1 2 3 4 5 6 | |
이 섹션에서는 indy_driver와 indy_moveit 두 개의 패키지를 사용합니다. indy_driver 패키지에는 ROS2와 Indy 로봇을 연결하는 통신 스크립트가 포함되어 있고, indy_moveit에는 Indy 로봇과 함께 moveit을 사용하기 위한 moveit 구성이 포함되어 있습니다.
Indy 로봇을 시작하려면 다음 명령을 사용할 수 있습니다. 이 명령은 Indy7 로봇 모델에 대한 드라이버를 실행하고 ROS2를 통해 로봇을 제어할 수 있게 합니다.
1 | |
이 명령을 사용할 때는 "192.168.xxx.xxx"을 실제 Indy 로봇의 IP 주소로 바꿔서 로봇의 IP 주소를 제공해야 한다는 점이 중요합니다.
Framework 3의 경우 indy_sw:=3을 입력합니다.
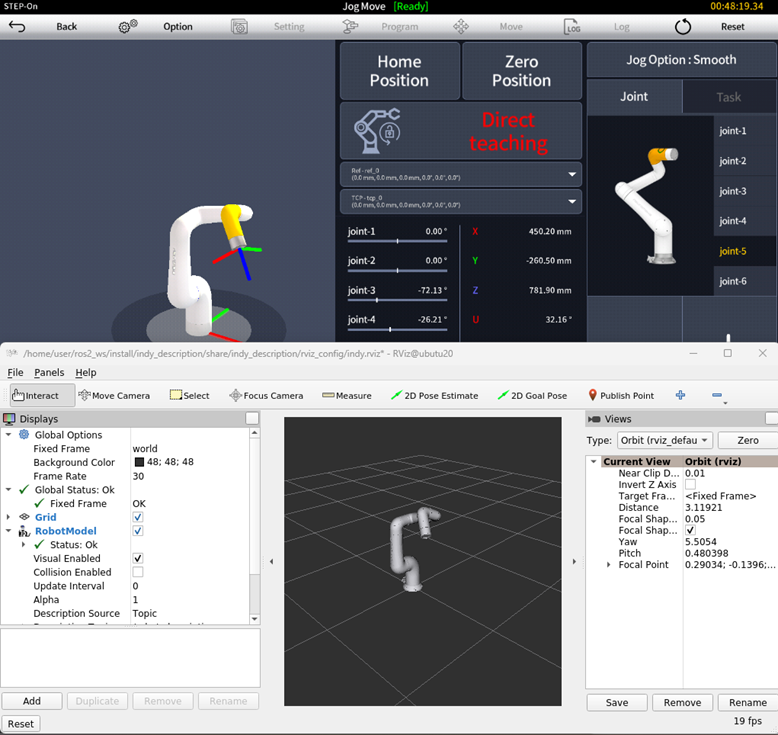
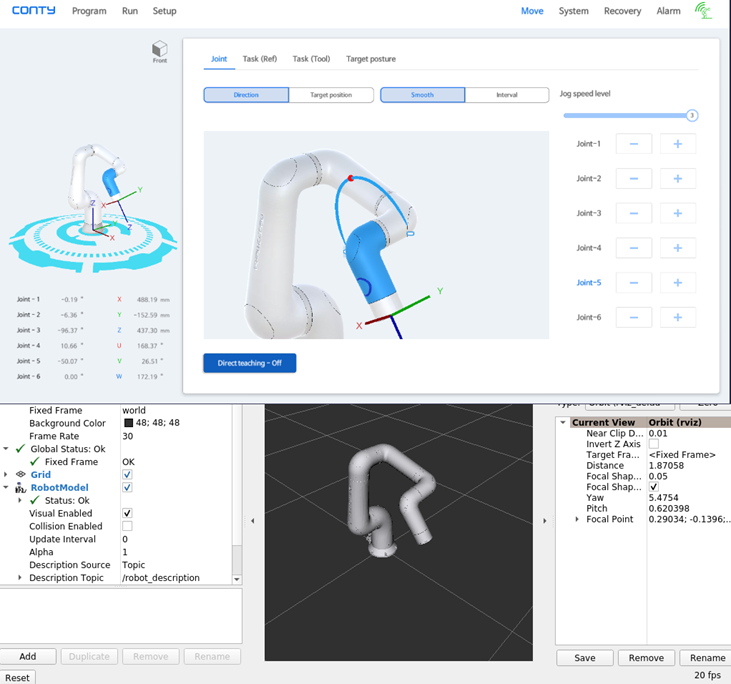
Framework 2와 Framework 3를 사용한 결과는 아래 이미지에서 확인할 수 있습니다.
Framework 2에서 사용
Framework 3에서 사용
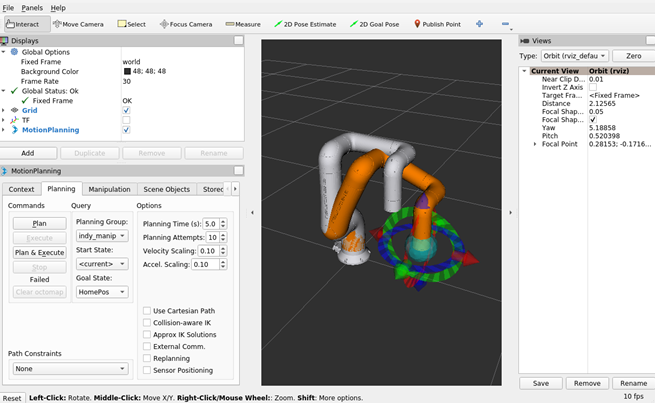
Moveit과 함께 Indy 로봇을 실행하려면 다음 명령을 사용할 수 있습니다. 이 명령은 실제 로봇에서 Indy7 로봇 드라이버와 함께 Moveit을 실행하여 로봇에서 움직임을 계획하고 실행할 수 있게 합니다.
1 | |
실제 로봇에서 Servoing 기능을 사용하려면 다음 명령을 사용해야 합니다. 이 명령은 실제 로봇에서 Indy7 로봇 드라이버와 함께 Servoing 기능을 실행합니다. 이렇게 하면 Servoing을 사용하여 로봇의 움직임을 제어할 수 있습니다.
1 | |
두 경우 모두, "192.168.xxx.xxx"을 실제 Indy 로봇의 IP 주소로 바꿔서 로봇의 IP 주소를 제공해야 합니다.
