로봇 시뮬레이션
"로봇 시뮬레이션" 섹션에서는 Gazebo 시뮬레이터를 사용하여 시뮬레이션 환경에서 Indy 로봇 모델을 실행하기 위한 명령을 제공합니다. 이는 물리적인 로봇이 없이 로봇 애플리케이션을 테스트하고 개발하는 데 유용할 수 있습니다.
패키지 구성
1 2 3 4 5 | |
이 섹션에서는 indy_gazebo와 indy_moveit 두 개의 패키지를 사용합니다. indy_gazebo 패키지에는 시뮬레이션 로봇에 대한 설명이 포함되어 있고, indy_moveit에는 시뮬레이션 로봇과 함께 moveit을 사용하기 위한 moveit 구성이 포함되어 있습니다.
실행
Gazebo에서 Indy 로봇을 시작하려면 다음 명령을 사용할 수 있습니다. 이 명령은 Indy7 로봇 모델이 로드된 Gazebo 시뮬레이터를 실행합니다.
1 | |
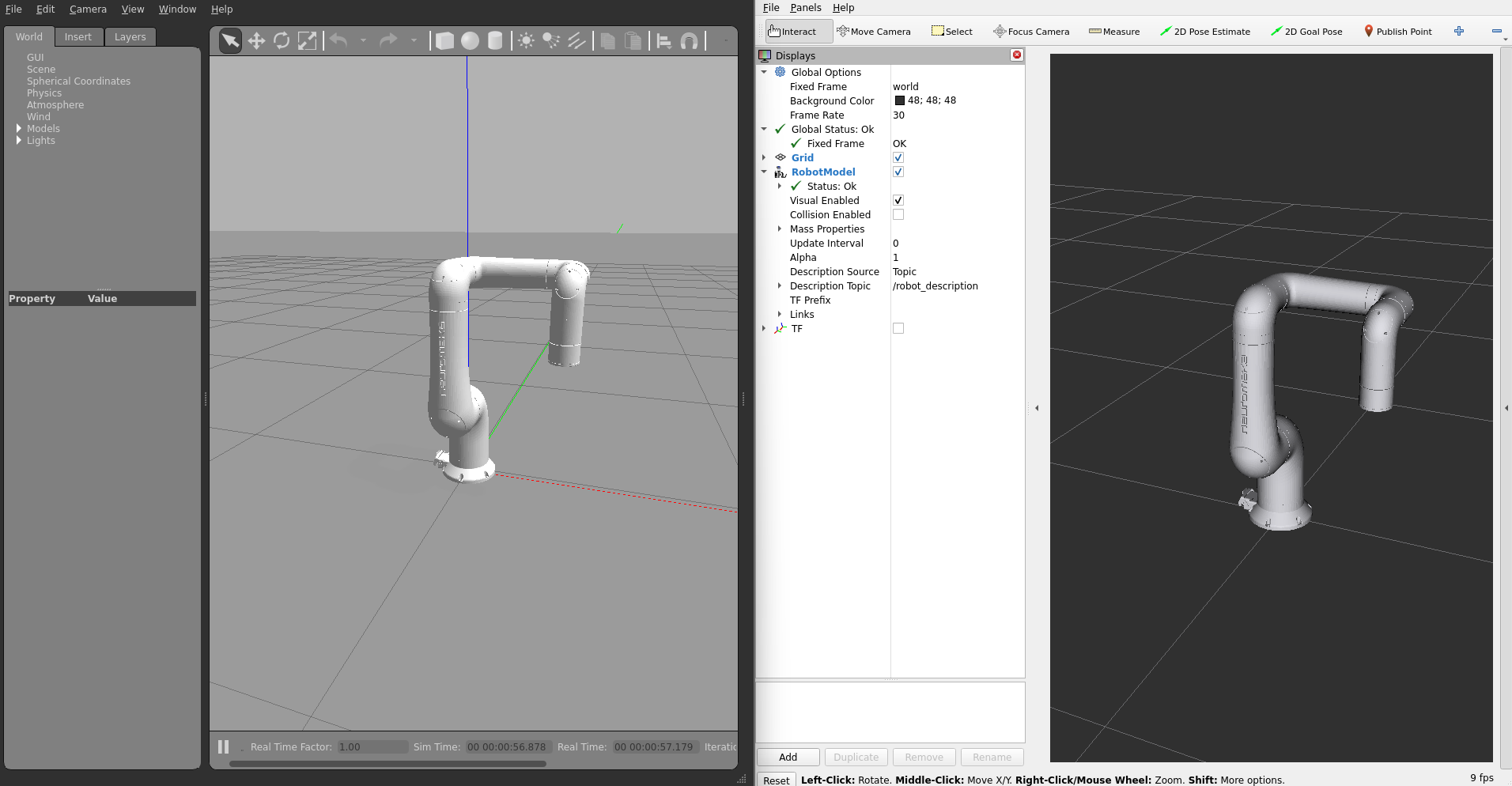
명령이 실행되면 gazebo 창과 Rviz 창이 실행되기 시작하고, 결과는 아래 이미지와 같이 표시됩니다.
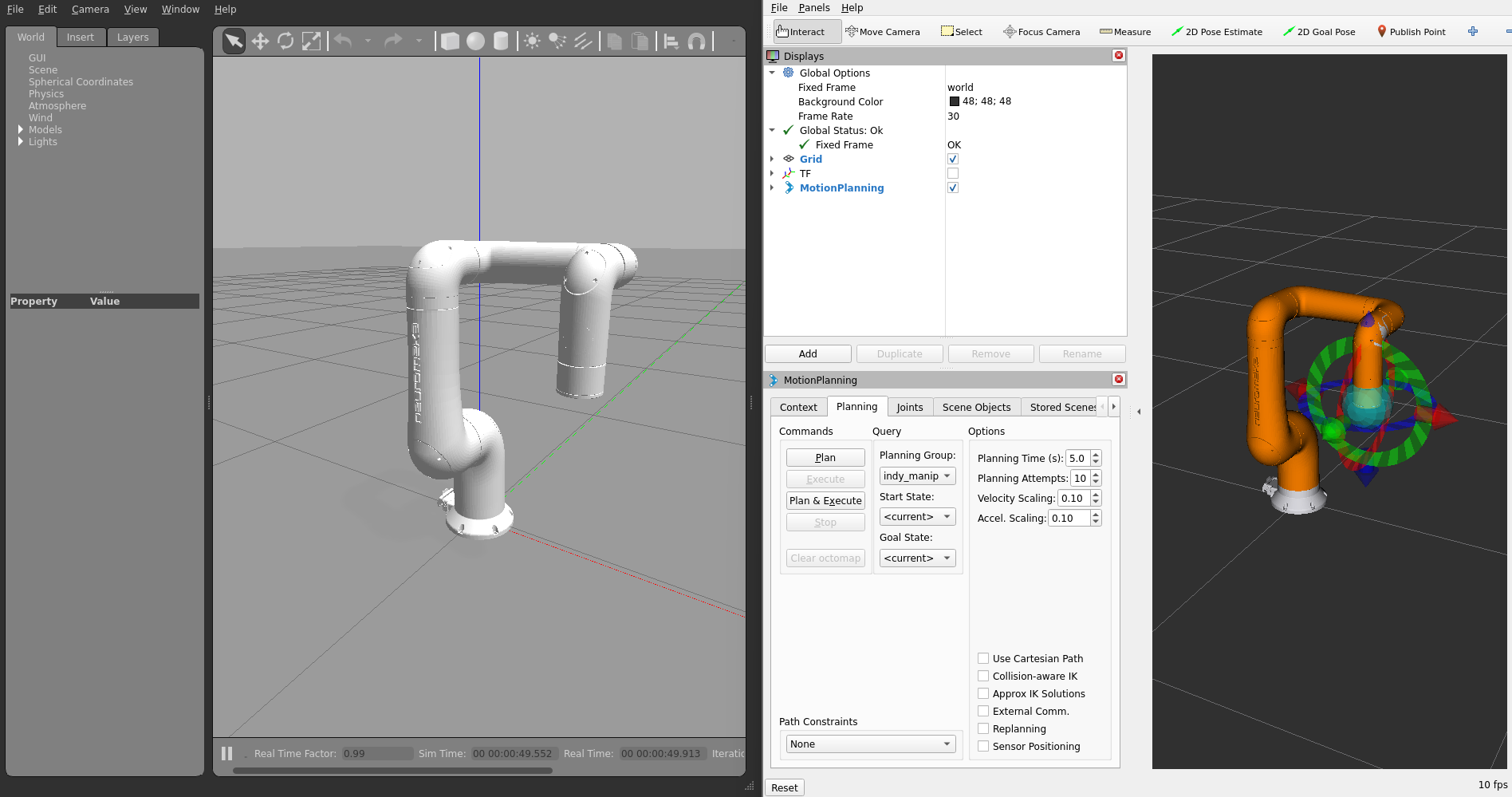
Gazebo 시뮬레이터에서 Moveit과 Servoing 기능을 사용하려면, Moveit을 사용하거나 Servoing을 사용하는 두 가지 옵션이 있습니다. Moveit을 사용하려면 다음 명령을 사용할 수 있습니다. 이 명령은 Indy7 로봇 모델과 Moveit이 로드된 Gazebo 시뮬레이터를 실행합니다.
1 | |
결과는 아래 이미지와 같이 표시됩니다.
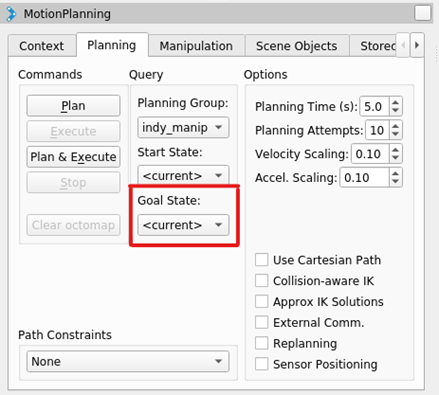
Goal State를 선택합니다, 미리 정의된 목표는 2개(HomePos와 ZeroPos)입니다. 그런 다음, Plan & Execute 버튼을 누릅니다. 로봇이 목표 위치로 이동할 것입니다.
Servoing 모드에서는 조이스틱 (예: Xbox 컨트롤러) 또는 키보드 또는 기타 장치를 사용하여 로봇을 제어할 수 있습니다. 먼저 장치를 PC에 연결하고, 필요한 드라이버를 설치하고 (키보드 또는 Xbox 컨트롤러의 경우 드라이버 설치가 필요 없습니다) 다음 명령을 사용합니다. 이 명령은 Indy7 로봇 모델과 Servoing이 로드된 Gazebo 시뮬레이터를 실행합니다.
1 | |
Xbox 컨트롤러로 Servoing 모드를 사용하면, Dpad를 사용하여 joint 2와 joint 4를 제어하고, B와 X는 joint 6를 제어하며, Y와 A는 joint 5를 제어합니다. 왼쪽 조이스틱, 오른쪽 조이스틱, LB, RB, LT, 그리고 RT는 TCP를 제어하는 데 사용됩니다.
키보드로 Servoing 모드를 사용하려면 다음 명령을 실행하십시오. 이 명령은 키보드 입력을 조이스틱으로 변환합니다.
1 | |
