시작하기
Moby-RP 특징 및 사양
Moby-RP (Research Platform)는 모바일 매니퓰레이터로서 자율 이동 로봇 Moby, 협동로봇 Indy, 로봇 비전 솔루션인 IndyEye가 통합된 연구용 로봇 플랫폼입니다. 이동성이 없는 협동 로봇에 이동성을 부여하여 제조, 물류, 배송, 순찰, 방역, 안내 등 다양한 용도로 사용할 수 있습니다. 뿐만 아니라 리프트나 서빙 트레이와 같이 다양한 장비와 결합하여 농업용이나 서비스용 로봇으로서도 활용할 수 있습니다.
Moby-RP는 라이다(LiDAR)를 이용한 주변 환경 감지와 RGB-D 센서를 이용한 3D 물체 인식, ToF 방식의 IR 센서를 이용한 가까운 장애물 인식으로 SLAM (Simultaneous Localization and Mapping)과 주행 (Navigation) 알고리즘을 통해 장애물을 회피하며 자율 주행이 가능합니다. 또한, 센서 플레이트의 변경을 통해 다양한 센서들을 탑재할 수 있습니다.
Moby는 스워브드라이브 (Swerve drivetrain) 방식으로 구동이 가능한데, 하나의 바퀴 모듈이 조향(무한 회전)과 전후진 구동이 가능한 2자유도 스티어링 휠로 구성되어 있습니다. 각 바퀴 모듈은 조향 모터와 구동 모터로 구성되어 총 8개의 구동기로 주행됩니다. 스워브드라이브는 구동력의 편차를 최소화함으로써 직진 제어성이 탁월하며 전 방향 주행이 가능합니다. 스워브드라이의 8축 구동기와 Indy7의 6개 관절 (또는 IndyRP2의 7개 관절), I/O 보드, 로봇앤드툴은 총 16개 (IndyRP2의 경우 17개)의 EtherCAT 슬레이브이며, 각각은 EtherCAT 마스터인 STEP3에 의해 동기제어됩니다.
Moby-RP의 하드웨어 구성은 아래와 같습니다.
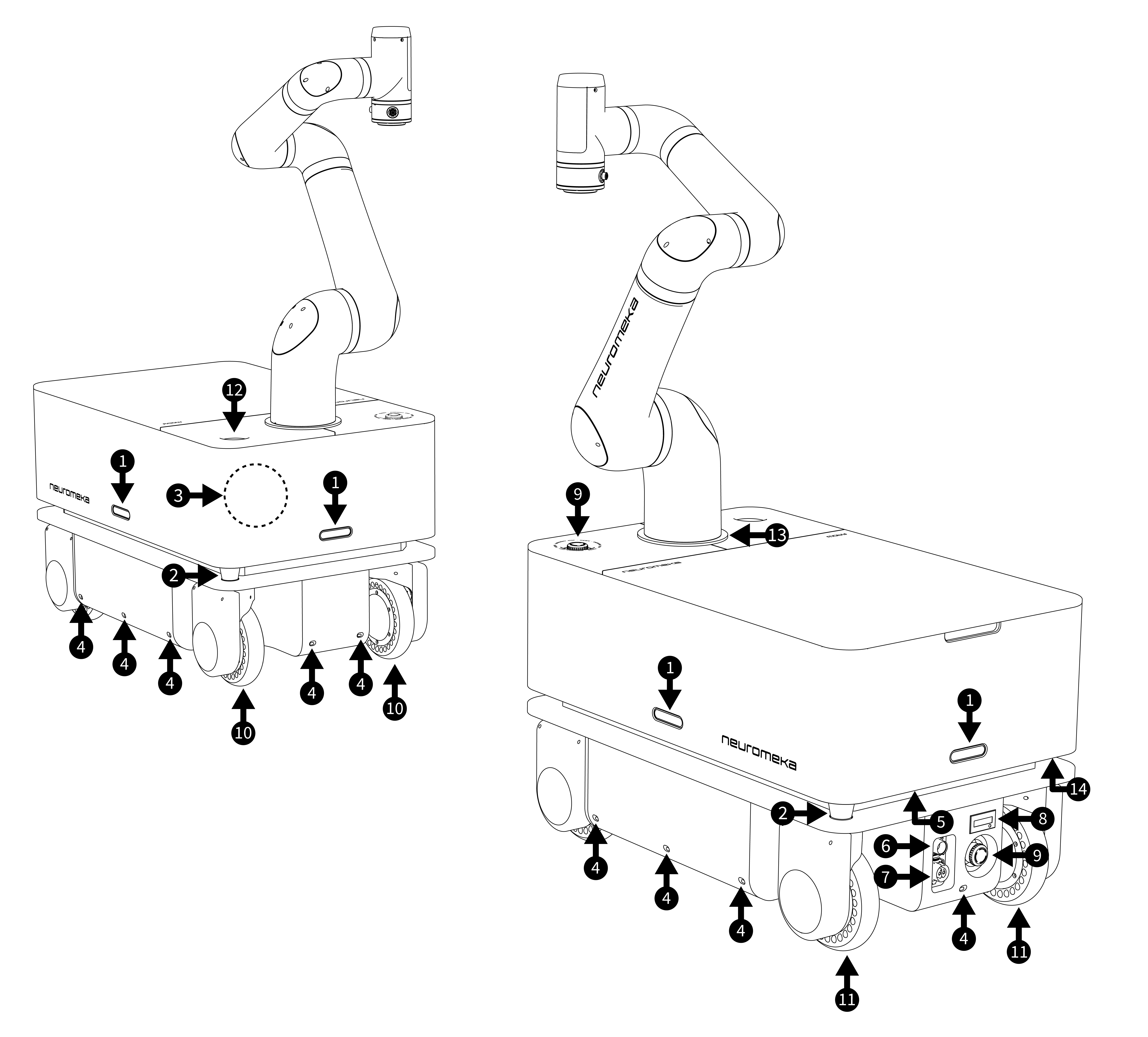
Moby configuration
| 구분 | 명칭 | 구분 | 명칭 |
|---|---|---|---|
| 1 | RGB-D 센서 (4개) | 8 | 배터리 잔량 표시기 |
| 2 | 라이다 센서 (2개) | 9 | 비상정지 버튼 (2개) |
| 3 | IMU 센서 | 10 | 프론트 휠 |
| 4 | ToF IR 센서 | 11 | 리어 휠 |
| 5 | USB 포트 | 12 | 스피커 |
| 6 | 비상전원 포트 | 13 | LED indicator |
| 7 | 충전 포트 | 14 | 전원 버튼 |
Moby 좌표계 구성
Moby의 좌표계는 아래와 같이 표현됩니다.
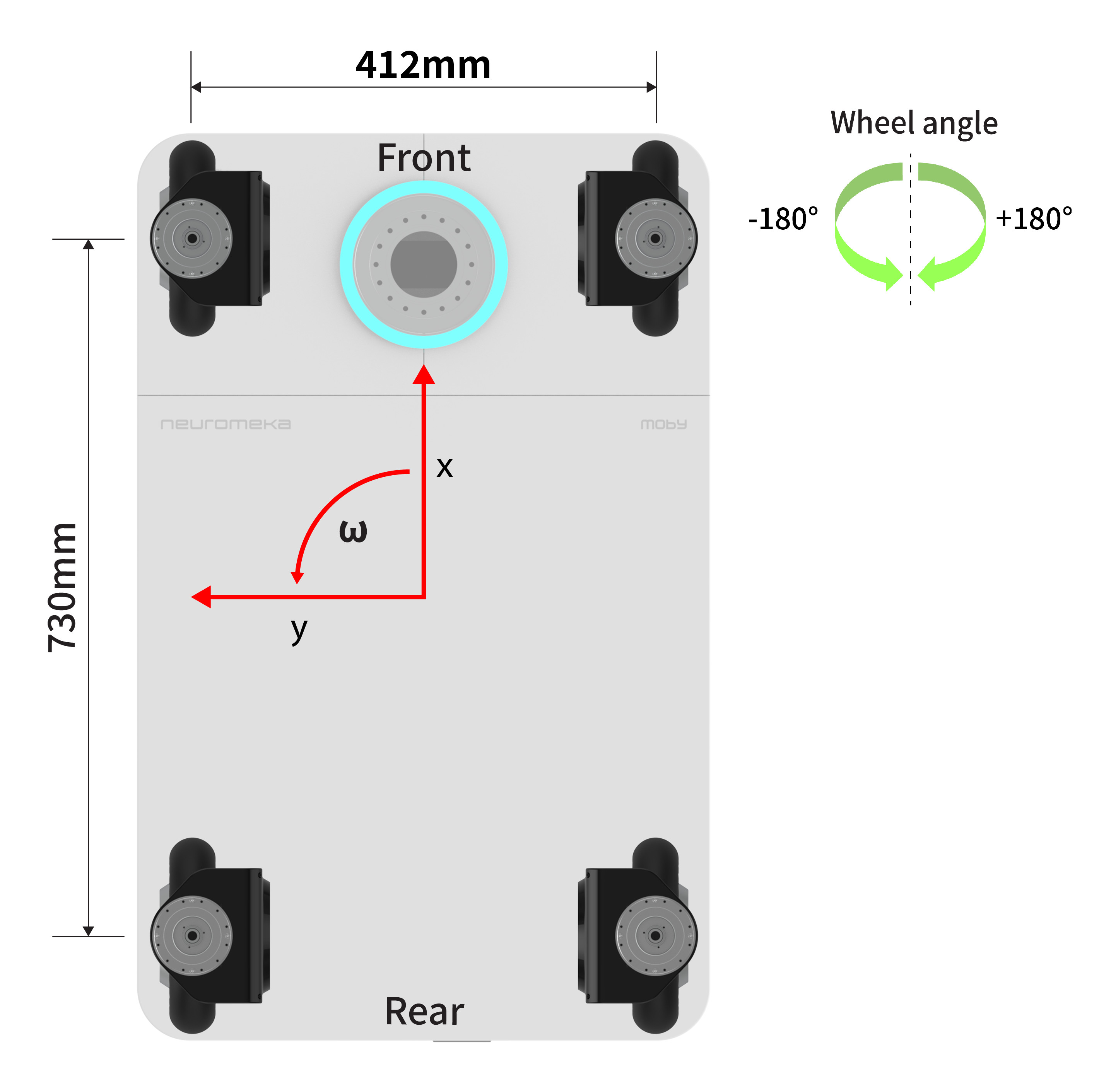
Moby의 차체 (Chassis) 좌표는 (x, y, \omega)로 표현이 되며 참조좌표계 기준으로 Moby위 위치는 (P_x, P_y, P_\omega), 속도는 (V_x, V_y, V_\omega)로 표기됩니다. 회전 반향은 반시계 방향이 + 방향으로 정의되며, 각 바퀴모듈의 조향 각도는 시계방향 회전이 + 방향으로 정의됩니다.
Moby SW Framework 구성
Moby-RP는 두 가지 제어 PC에 의해 동작됩니다.
- STEP3: 모터드라이브, IO보드, 앤드툴보드에 대한 실시간 제어, IMU 센서, IR 센서 신호처리, IndyEye 영상처리
- NUC: 3D 카메라 영상 처리, 라이다를 이용한 SLAM / Navigation
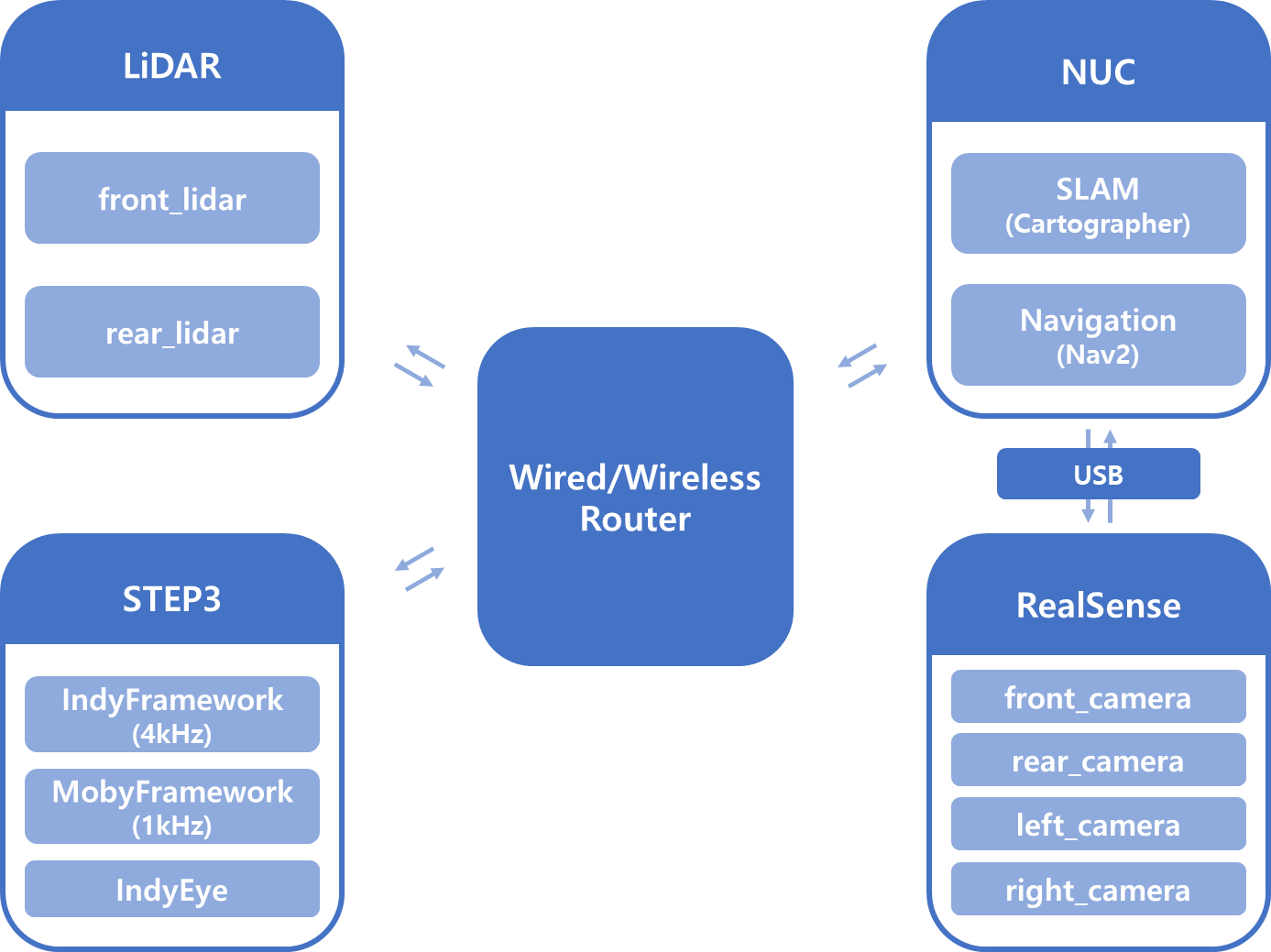
통신 계통도
STEP3 및 NUC은 아래의 형태로 연결되어 상호간의 데이터를 주고받도록 구성되어 있습니다.
Moby 접속하기
Moby의 IP 주소와 포트 정보는 Moby의 라우터를 통해 외부 PC에게 제공되며, 이를 이용하여 외부 PC에서 Moby에 접속할 수 있습니다. STEP3와 NUC는 고정 IP로 설정되어 있으며, 납품 시 제공되는 정보를 통해 이를 확인할 수 있습니다. 이후, STEP3 및 NUC을 이용하여 Moby를 제어하고 모니터링할 수 있습니다.
- STEP IP: 192.168.214.20
- NUC IP: 192.168.214.21
