Troubleshooting
1. 컴포넌트가 작동하지 않음
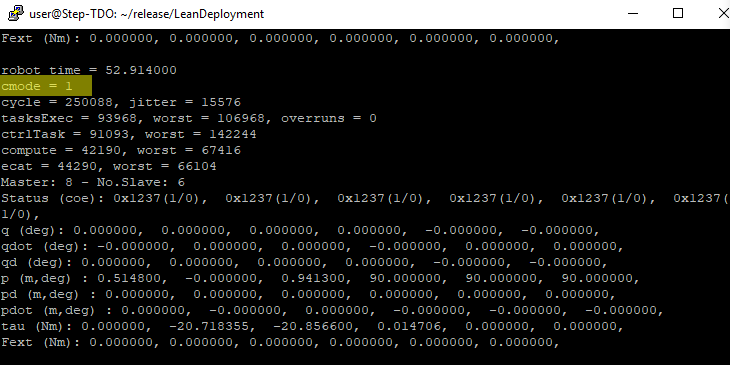
아래 그림에서 볼 수 있듯이 cmode는 로봇의 현재 제어 상태를 나타냅니다.
또한 아래의 제어모드 표에서 볼 수 있듯이 제어 상태에 따라서 관련 컴포넌트만이 활성화됩니다. 다시말해서 개발 된 컴포넌트는 특정 cmode에서만 동작한다는 것을 의미합니다.
제어모드 (cmode) |
Joint Trajectory Interpolation Component | Joint Control Component | Task Trajectory Interpolation Component | Task Control Component |
|---|---|---|---|---|
| 준비 (0) |
- | computeControlTorq | - | - |
| 조인트무브 (1) |
traj | computeControlTorq | - | - |
| 태스크무브 (2) |
- | - | traj | computeControlTorq |
| 직접교시 (3) |
- | computeGravityTorq | - | - |
제어모드 별로 호출되는 컴포넌트 함수
