Real Robot Control
The "Real Robot Control" section provides commands for launching the ROS software with a real Indy robot. This can be useful for testing and running applications on an actual robot.
Package Configuration
1 2 3 4 5 6 | |
This section uses two packages: indy_driver and indy_moveit. The indy_driver package contains the communication script to connect ROS2 with Indy robot. while indy_moveit contains moveit configuration to use moveit with Indy robot.
To start the Indy robot, the following command can be used. This command will launch the driver for the Indy7 robot model and allow you to control the robot through ROS2.
1 | |
It's important to note that when using this command, you will need to provide the IP address of the robot by replacing "192.168.xxx.xxx" with the actual IP address of your Indy robot.
In Framework 3, put indy_sw:=3 for the argument.
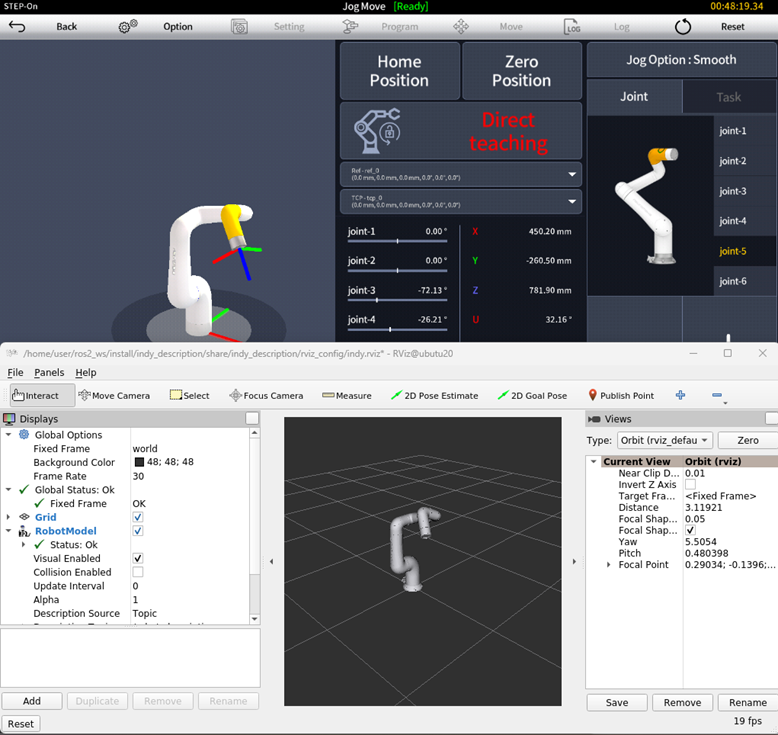
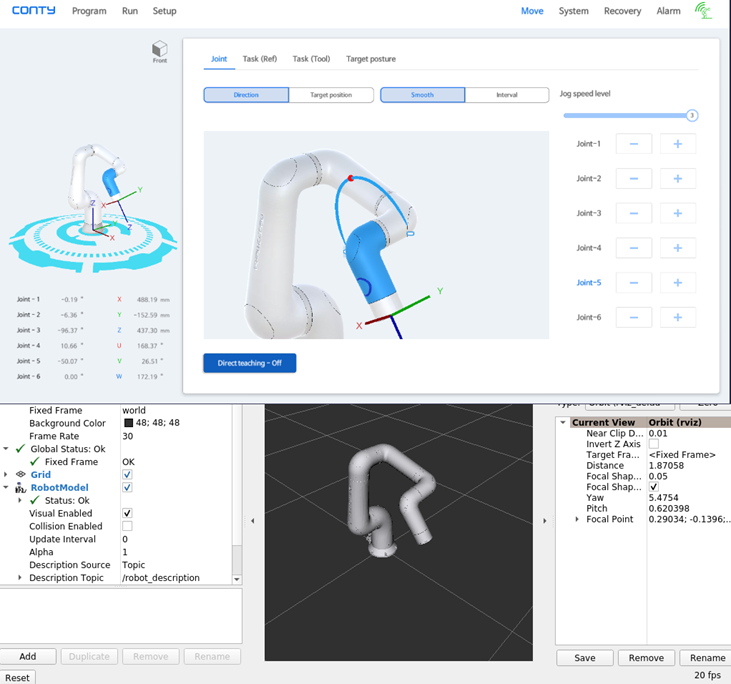
The result of using Framework 2 and Framework 3 will be shown in the below images.
With Framework 2
With Framework 3
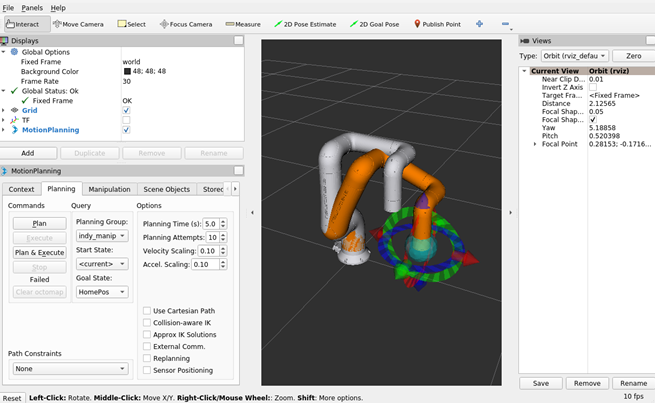
To launch the Indy robot with Moveit, the following command is provided. This will launch Moveit along with the Indy7 robot driver on the real robot, allowing you to plan and execute motions on the robot.
1 | |
If you want to use Servoing functionalities on the real robot, the following command should be used. This command will launch Servoing functionalities along with the Indy7 robot driver on the real robot. This will allow you to control the robot's motion using Servoing.
1 | |
Note that in both cases, you need to provide the IP address of the robot by replacing "192.168.xxx.xxx" with the actual IP address of your Indy robot.
