캘리브레이션
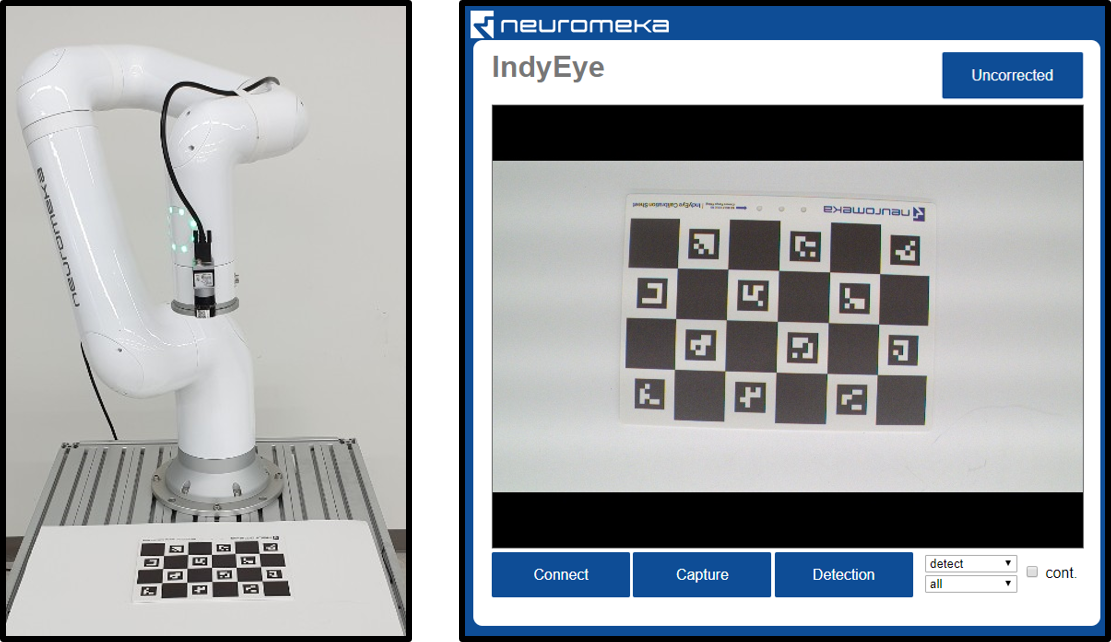
로봇에 설치된 카메라의 캘리브레이션
주어진 캘리브레이션 시트를 여러 방향에서 촬영함으로써, 카메라 파라미터들과(초점거리, 오프셋, 왜곡) 로봇 끝단과 카메라 사이의 오프셋을 캘리브레이션 할 수 있습니다.
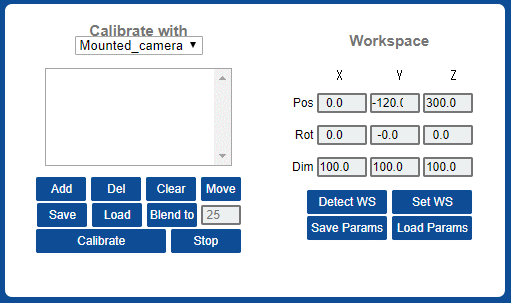
- 로봇을 홈 포지션으로 이동하고, Calibration탭을 선택합니다. "Calibrate with" 란에서 "Mounted camera" 를 선택합니다.
- 캘리브레이션 시트를 작업 공간 상에, 카메라에서 관측되는 위치에 놓습니다.
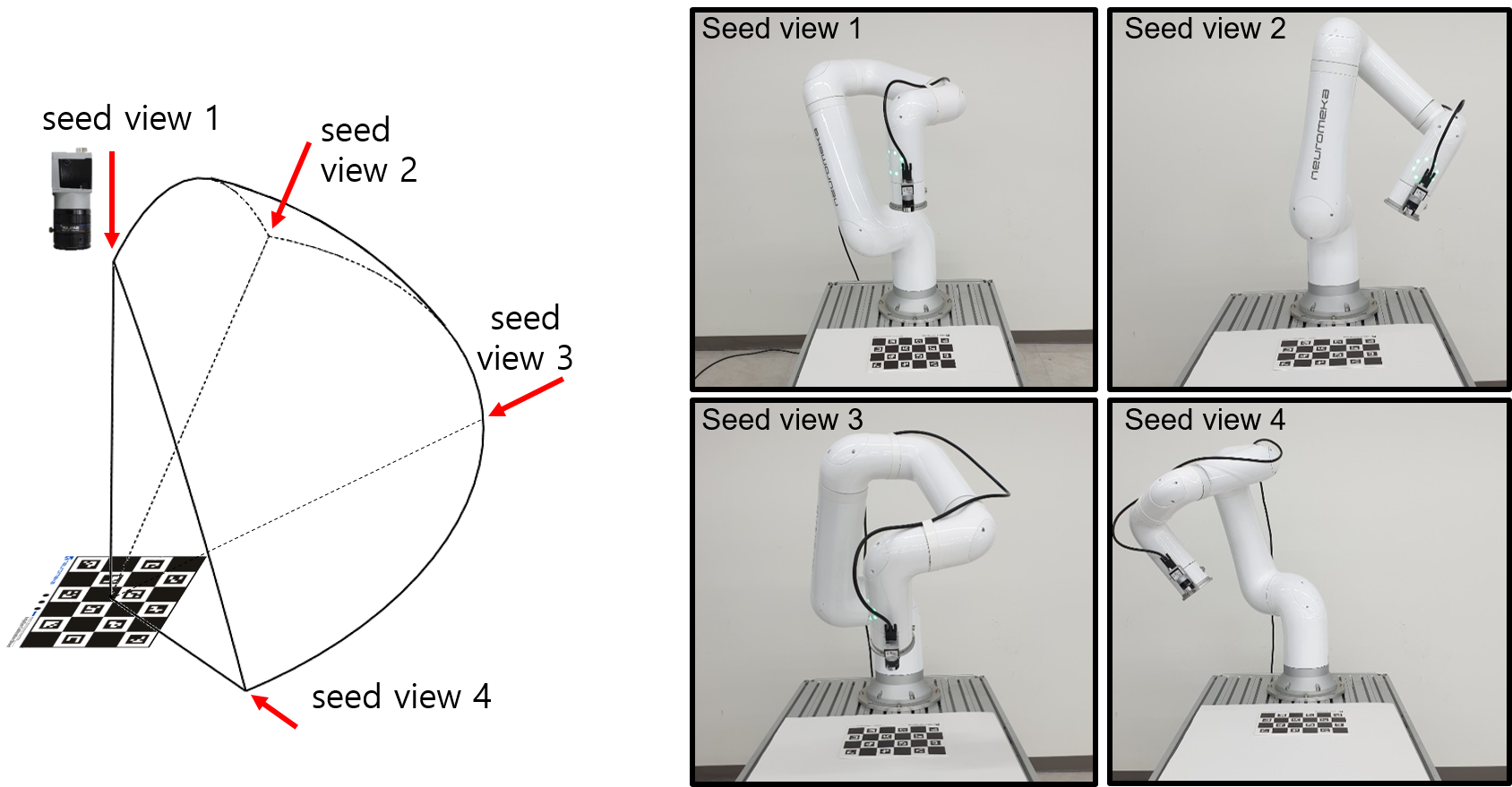
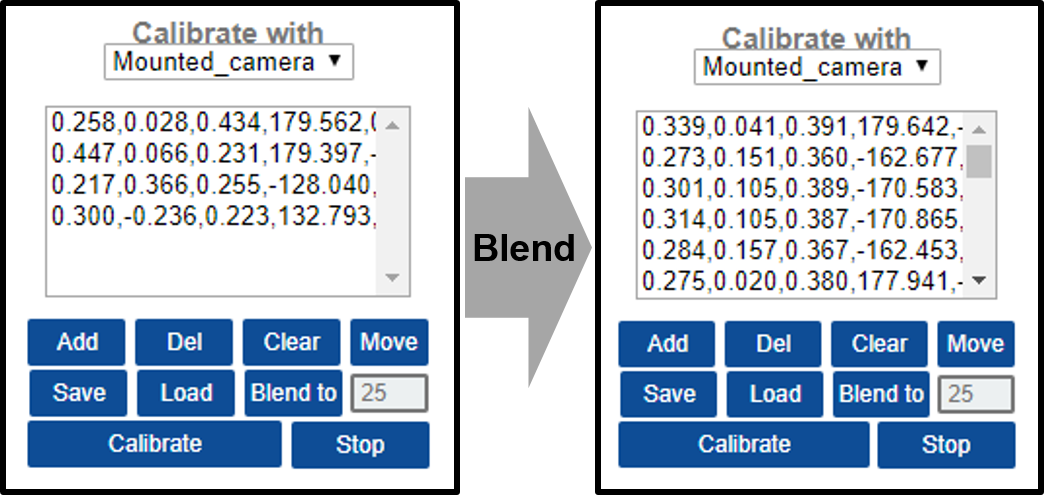
- 캘리브레이션을 수행하는 동안 동작의 범위를 지정하기 위해, 기준 시점 목록을 생성합니다.
- Calibrate 버튼을 클릭해 캘리브레이션을 시작합니다. 로봇이 자동으로 움직이며 캘리브레이션 시트의 사진을 촬영합니다. 촬영이 끝난 후, 캘리브레이션을 위한 연산이 시작되며 이는 1분 내외의 시간이 소요됩니다. "Calibration is done"이라는 메시지를 기다려 주십시오.
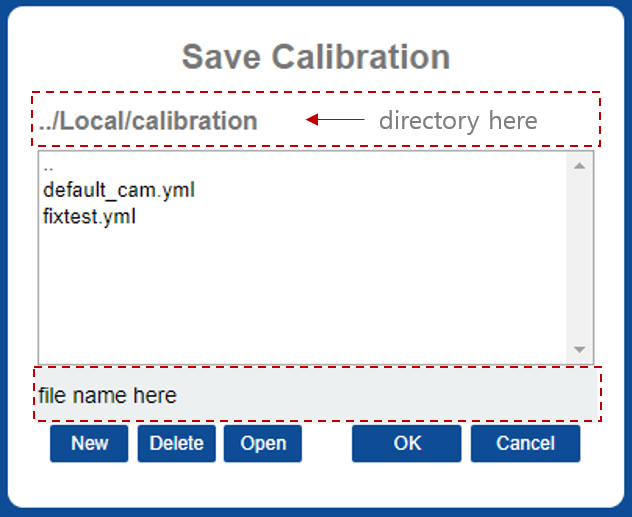
- Save Params 버튼을 클릭해 캘리브레이션 결과를 저장합니다. 파일 브라우저 창에서, 새 파일 이름을 입력한 뒤 OK 버튼을 클릭하면 저장됩니다. 프로그램이 시작될 때 자동으로 로드되는 기본 파일명은 "default_cam.yml"입니다.
- 캘리브레이션이 완료된 뒤에는 카메라의 왜곡을 보정할 수 있습니다. 카메라 패널에서, "Uncorrected"라고 표시된 버튼을 클릭합니다. 버튼의 글씨가 "Undistorted"로 바뀌고, 다음 캡쳐부터는 카메라에 왜곡 보정이 적용됩니다.
작업 공간
캘리브레이션이 완료된 후에는 작업 공간을 설정해야 합니다.
- 캘리브레이션 시트를 작업 공간에 놓고 카메라를 작업 공간을 향해 위치시킵니다.
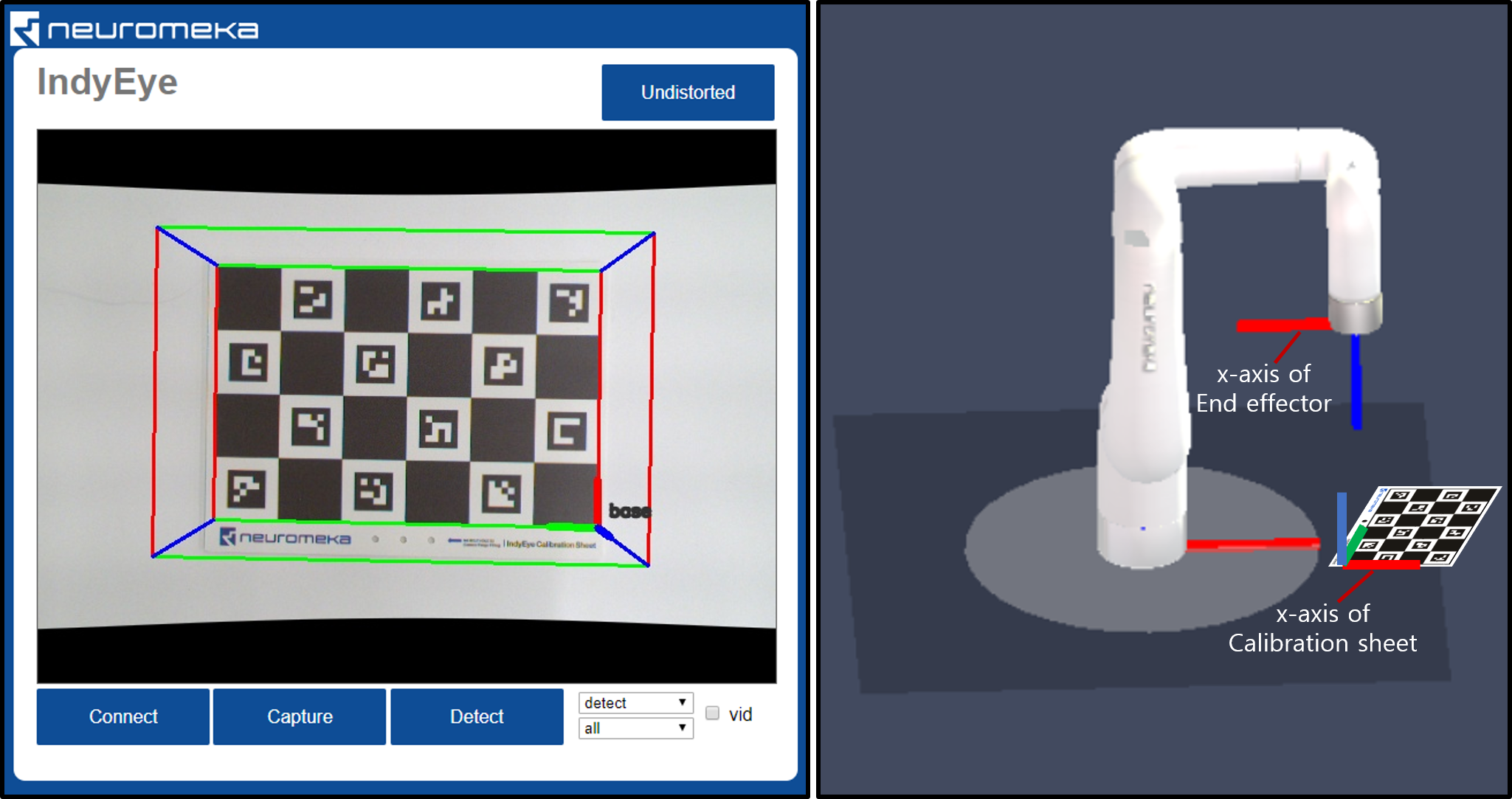
- 주의: 작업 동작 시 Indy 끝단의 x축(콘티에서 확인, 붉은 축)과 워크스페이스의 x축(붉은 선)이 서로 반대 방향을 향하도록 워크 스페이스를 설정합니다.(아래 그림 참조) 작업시 이 방향과 가장 가까운 방향을 선택하게 됩니다.
- Detect WS 버튼을 클릭하면 인식된 작업 공간이 카메라에 표시됩니다.
- 작업 공간을 편집합니다. Workspace 패널에는 9개의 에디트 박스가 있으며, 각 줄은 위치, 방향, 크기를 결정합니다. Set WS 버튼을 눌러 변경 사항을 적용합니다.
- Save Params 버튼을 눌러 작업 공간을 저장합니다.
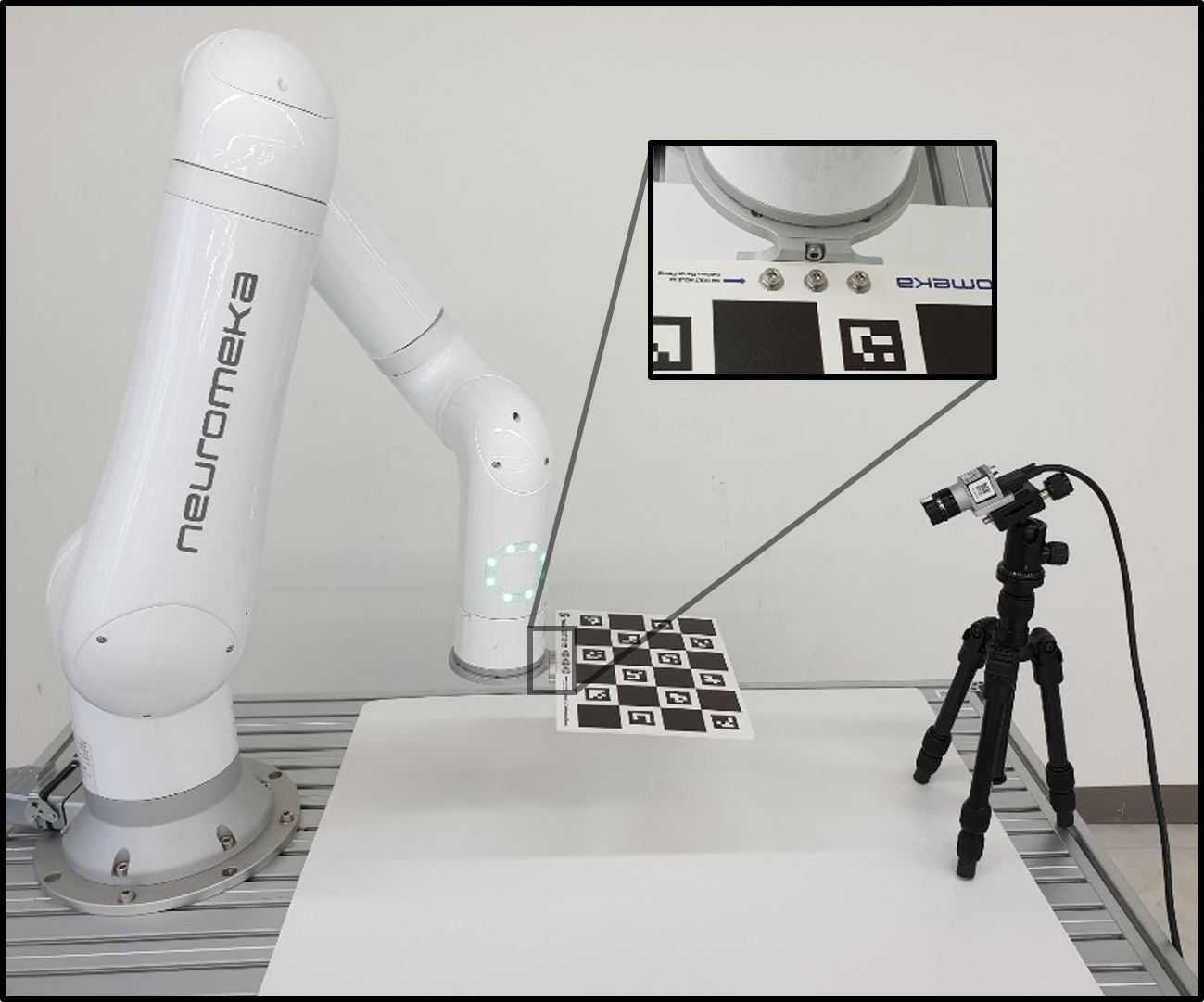
고정된 카메라의 캘리브레이션
- 카메라를 사용될 위치에 고정합니다.
- "Calibrate with"란을 "Fixed Camera"로 설정합니다.
- 캘리브레이션 시트를 Indy 끝단에 시트 마운트와 플랜지를 이용해 부착합니다.(M4×8 볼트 8개, M4×6 핀 2개, M3×8 핀 2개, M4 와셔 3개 사용)
- 기준 시점 목록을 작성하고 혼합해 여러 뷰를 생성합니다. 고정 카메라의 경우에는, 캘리브레이션 시트가 이동하고 카메라는 고정되어 있다는 점을 주의하십시오. 캘리브레이션 시트가 항상 카메라에서 관측 가능하도록 해 주십시오.
- Calibrate 버튼을 클릭해 캘래브레이션을 수행합니다. "Calibration is done"가 출력될 때 까지 기다려 주십시오.
- Save Params 버튼을 클릭해 캘리브레이션 결과를 저장합니다.
- 캘리브레이션 시트를 Indy로부터 분리하고, 작업 공간 섹션으로 가서 작업 공간을 설정하십시오.